7COM1084 Assignment Sample – Specialism Research Report 2022
Introduction (7COM1084 Assignment Sample – Specialism Research Report)
The robots can be described as the machine which can do such works which only human can do. They can be pictured as the machines which can reduce the human efforts to do a work. However a lot of work has been done on the robotic behaviors so that they can be interacting with the humans more. A lot of development work has been done on this purpose to improve the behavior shown by the robots to make their tasks easier of the humans.
Those robots are called social robots which can show the behavior just like any human does and can gather more entities. Also it has to be able to do those works which can be done by any humans in the acceptable way. In this research report the social robots are expected to do work by their own logic while the user is busy doing other work.


In that particular field the interaction of the social robots with the humans is very much needed. In this report behavior of the social robots has been discussed.
Research Question
Q1: Why social robots are needed to improve tasks easier of the humans?
Q2: What are the roles of robots in creating human awareness?
Q3: How the robots are taking decisions by their own and do they are reliable?
In this modern world, one of the best inventions of science is robot which can do all the works which any human can do in their daily life (Rossi, et al, 2020). Apart from that robots can be made in a way in which they can do any work which the humans cannot do easily. Robots can be used in any field like in hospitality, restaurants, and museums and so on.
Also a robot can do the household works. The robots which show behavior to the humans are called social robots. They are made for some particular situations. They have to be able to do work by their own while the user is busy.
Robots which are being operated in the human environments, requires some ability to detect the behavior of the people and it should be recognizing the activity made by the people in both non interactive and interactive tasks. In the human- robot interactions the intensity of the perception of the robot detecting the behavior of the human depends upon the interaction and the proximity effect of the interaction (Rossi, et al, 2020).

In the non interactive tasks, the user remotely controls the robot and the interaction of the human and the robot cannot take place. But in the close interaction of the human-robot, the robot can detect the behavioral pattern of the human and based on the calculation it will provide the output of the behavior. It can potentially create a common awareness in the people about the behavior of the human or humans.
Using the deep leaning methods and AI technology and with the help of programming software’s these robots can be designed logically which will be pretested before coming into the market (Pennazio, 2017).
Using the deep learning methods, the robot will be properly trained with detecting the behavior of the humans and will produce a pattern of the analysis. Analyzing the output the decisions can be taken by the robot. The decisions taken by the robots will be reliable as all the decisions taken by robot will be properly analyzed.
Existing and related work
According to Mehdi Khamassi, member of IEEE, all the dynamic uncontrolled robots, if interacts with humans, they have to learn to analyze the behavior shown by the human. It needs to record all the changes that happen in the behavior of the human. The robot takes following signals from the body of the humans such as the human gaze signals which provides necessary information about the recent changes in the human body.

Also it can be determined that whether the robot should continue or terminate the processing task. Though it is known that the reinforcement of the robot is not that much developed and it is still being developed. In the research paper, the researchers have proposed a developed algorithm where HRI method has been used. The inputs for the model have been taken as the sum of the current engagement of the human’s with the variation of this engagement.
A action space full of parameters have been used where a meta-learning algorithm has been implemented in the action space of the discrete field. Also it will detect all the continuous characteristics of the human body like velocity, direction, strength and so on. A HRI task in the simulated form has been applied to the model to see whether the model is working properly or not. The output will be expressed as either in active form or in the passive form.
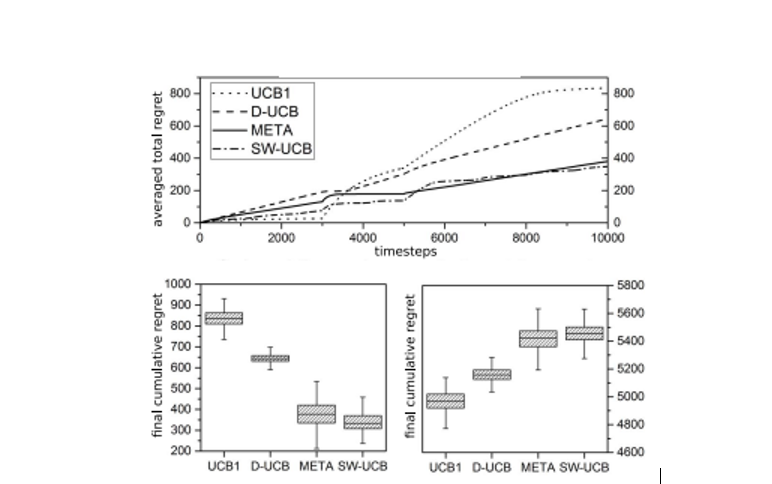
Figure 1: Performance curve
(Source: ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=8404000)
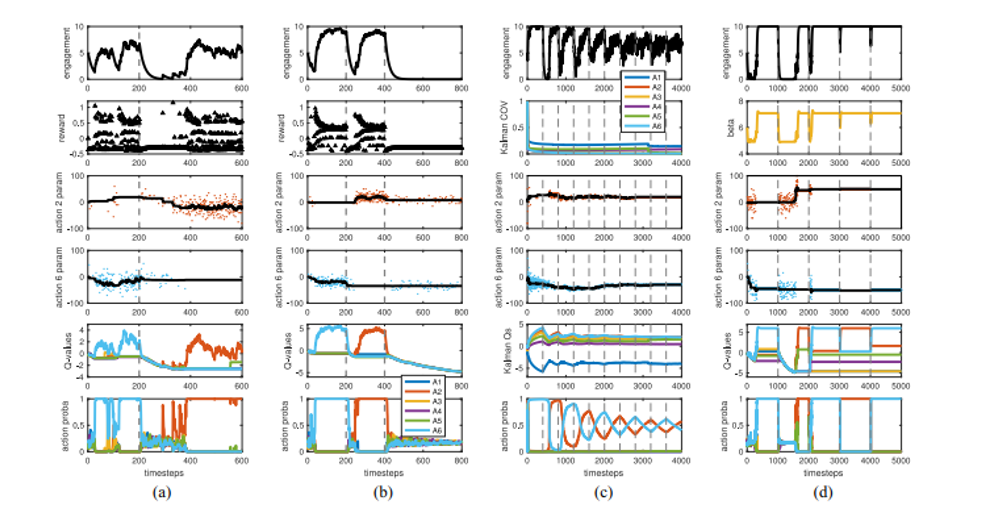
Figure 2: RL Algorithm
(Source: ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=8404000)
According to Camilia Lindholm, Healthy ageing can be associated with changes in the language. Those strong changes can be analyzed using the processing systems. The process of preparing the syntactic structure and contact of semanticists can increase the quality of the language processing. But this process is also not giving the deserted criteria of the output.
Research Approach
Secondary research method has been used here in this research paper to answer all the questions of the research paper (Polverino, et al, 2019). All the research questions have been answered by going through some journals, research papers, and website data and so on. Previously all the robots that have been designed, they did not have any analysis power to detect the human feelings but from the past decade research and development work have been started on this field.
These robots can do the structural analysis of the human behavior and so can be able to give p[roper output. Lie detector has been the most reliable machine since few years and from that device only these research have been started. Lie detector basically catches whether the person is saying truth or not by catching several parameters like pressure, number of pulses and so on.
But sometimes it may be failed to detect the correct output as if the parameters taken by the machine becomes normal then it will show undesired result.
Social robots can be also used to check whether the user itself is a robot or not. It will provide some puzzle type game and if the user is a robot it would not solve the puzzle (St-Onge, et al, 2018). In this way many websites are created so that their data does not get stolen. But with the ageing of the robots they may get slow at their work and they may start to show the wrong inputs.

These things can be seen for the household robots. On the other hand the robots may increase the consistency, efficiency, quality and productivity of humans in many difficult situations. Social robots do not get bored like the humans and they can continue doing their work for years and years. The output given by them may be very accurate and the desired result may come out from them (Oliff, et al, 2020).
But to design a robot for maximum number of desired work becomes very complex and hard to install at the workplace. The researchers have used secondary research method to analyze the given topic here which is very relevant to the desired results or to the outcomes.
Personal Investment
Robotics has been one of the greatest fields of study in these past two decades and people really want to study about the topic (Bryndin, 2017). As the study of this field requires the knowledge of several other fields such as knowledge of the software, programming languages, data structures, AI technology, deep learning methods and so on and as a result to enhance the knowledge, study of Robotics have been in the limelight.
As mentioned above, social robots have to be able to do all the desired work. As the social robots include human interaction, it gives the output based on the remote interaction or based on the close interaction of human and robots. To study about the topic the research questions are very important to be discussed.
One of the researchers has implemented all the techniques that have been mentioned above and then they started doing research on this particular field.

Reference List
Journal
Bryndin, E., 2017. Program Hierarchical Realization of Adaptation Behavior of the Cognitive Mobile Robot with Imitative Thinking. International Journal of Engineering Management, 1(4), pp.74-79.
Gao, Y., Barendregt, W., Obaid, M. and Castellano, G., 2018, August. When robot personalisation does not help: Insights from a robot-supported learning study. In 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN) (pp. 705-712). IEEE.
Oliff, H., Liu, Y., Kumar, M., Williams, M. and Ryan, M., 2020. Reinforcement learning for facilitating human-robot-interaction in manufacturing. Journal of Manufacturing Systems, 56, pp.326-340.
Pennazio, V., 2017. Social robotics to help children with autism in their interactions through imitation. Res. Educ. Media, 9, pp.10-16.
Polverino, G., Karakaya, M., Spinello, C., Soman, V.R. and Porfiri, M., 2019. Behavioural and life-history responses of mosquitofish to biologically inspired and interactive robotic predators. Journal of the Royal Society Interface, 16(158), p.20190359.
Rossi, S., Larafa, M. and Ruocco, M., 2020. Emotional and behavioural distraction by a social robot for children anxiety reduction during vaccination. International Journal of Social Robotics, 12(3), pp.765-777.
Rossi, S., Rossi, A. and Dautenhahn, K., 2020. The secret life of robots: Perspectives and challenges for robot’s behaviours during non-interactive tasks. International Journal of Social Robotics, 12(6), pp.1265-1278.
St-Onge, D., Pinciroli, C. and Beltrame, G., 2018, October. Circle formation with computation-free robots shows emergent behavioural structure. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 5344-5349). IEEE.
Know more about UniqueSubmission’s other writing services:

Hi there! Do you use Twitter? I’d like to follow you if that would be okay. I’m definitely enjoying your blog and look forward to new posts.
https://suba.me/
I am so grateful for your blog article.Really looking forward to read more. Really Cool.
https://augustaseoweb.com/roofing-contractor-augusta
Do you have a spam issue on this blog; I also am a blogger, andI was wondering your situation; many of us havecreated some nice procedures and we are looking to exchange methods with other folks, be sureto shoot me an e-mail if interested.
https://lifecyclestage.blogspot.com/2023/04/the-college-experience-guide-for.html
I agree Dave, these sorts of apps do have their place and can be quite handy when you need to get rid of some clutter (even if you don’t make that much on the item!).
https://lifecyclestage.blogspot.com/2023/04/golden-years-navigating-old-age-with.html
ivermectin reddit ivermectin overdose in dogs
https://rentry.co/imqi7
Cómo iniciar siri o siri pro si han comprobado correctamente el trabajo
https://andypausoccer.wordpress.com/
I like reading through an article that can make men and women think. Also, many thanks for allowing me to comment!
http://poker88.mom
“Itis nearly impossible to find well-informed people on this topic, but you sound like you know what youire talking about! Thanks”דירות דיסקרטיות במרכז
http://frozenantarcticgov.com/2023/05/08/five-most-important-points-to-find-out-when-enjoying-casino-slots-online/
Thanks so much for the article.Much thanks again. Want more.
https://idiaphragm.com/page-15.html
Greetings! Very helpful advice in this particular post! It’s the little changes which will make the most significant changes. Many thanks for sharing!
https://www.siatex.com/blank-t-shirt-suppliers-and-manufacturers-in-bangladesh/
affordable essay writing service help writing argumentative essay
https://public.sitejot.com/tankerwhip8.html
how long does ivermectin stay in horse manure side effects of ivermectin in humans
https://sloan-grimes.thoughtlanes.net/the-reasons-why-online-casino-gambling
There is certainly a great deal to find out about this subject. I like all of the points you made.
magnificent points altogether, you simply gained a new reader.What could you recommend in regards to your publish that you just made afew days in the past? Any certain?
https://justbookmark.win/story.php?title=investing-in-crypto-1#discuss
Really appreciate you sharing this article. Want more.
https://store.smoktech.com/product/details/rpm-4-kit
best ed pill for diabetics – managing contraceptive pill patients 15th ed ebook little blue pill for ed
https://linkbuilder.info/question/379/off-page_seo_tools_/
A round of applause for your blog article.Thanks Again. Awesome.
https://altbookmark.com/story10742377/reformas-integrales-zaragoza
I appreciate you sharing this article.Really thank you! Cool.
https://ttrebags.com/
Aw, this was a very nice post. Spending some time and actual effort to make a good articleÖ but what can I sayÖ I hesitate a whole lot and don’t manage to get anything done.
https://coincoach.ca/members/goosesalt7/activity/318605/
hello!,I like your writing so so much! share we be in contact extra about your poston AOL? I require an expert on this space to resolve my problem.May be that’s you! Taking a look ahead to look you.
https://www.meetingwithpia.org/members/maylamb27/activity/191470/
Awesome things here. I am very glad to see your article.Thank you so much and I am looking ahead to contact you.Will you kindly drop me a e-mail?สล็อต
https://startupo.fr/question/5804/guide_seo_google_pdf_/
I am continuously searching online for articles that can assist me. Thanks!
http://biomocktails.art/story.php?id=27850
Really appreciate you sharing this blog. Much obliged.
http://lodserver.iula.upf.edu/describe/?url=https://www.monmall.ph/instax-film-price-philippines
Thanks on your marvelous posting! I seriously enjoyed reading it, you’re a great author.I will make certain to bookmark your blog and will eventually come back in the future. I want to encourage that you continue your great job, have a nice day!
https://click4r.com/posts/g/9768578/
コピー時計Water Differential Pressure TransmitterFFP3
Hey there! I just wanted to ask if you ever have any problems with hackers?My last blog (wordpress) was hacked and I ended up losing a fewmonths of hard work due to no data backup. Do you have any solutions to protect againsthackers?
https://blogfreely.net/mirrorspear1/find-out-stunning-with-an-led-display-rental
write compare and contrast essayessay editorwriting opinion essays
https://mel-assessment.com/members/bordermonth4/activity/1307404/
Great blog post.Thanks Again. Great.
https://www.nide-international.com/pro-70-Vacuum-cleaner-32-segments-electric-DC-motor-commutator.html
adıyaman hava durumu; adıyaman için hava durumu en güncel saatlik, günlük ve aylık tahminler.
https://anotepad.com/notes/e49wdheq
What as up everyone, I am sure you will be enjoying here by watching these kinds of comical movies.
https://www.deviantart.com/tormand3556/about
Thanks for the good writeup. It if truth be told was once a enjoyment account it. Glance advanced to more added agreeable from you! By the way, how can we communicate?
https://public.tableau.com/app/profile/torman.hanson
stromectol – ivermectin over the counter stromectol for lice
https://bluetoothdental.com.au/
Can someone recommend Beachwear? Thanks xox
https://uberant.com/article/1920457-points-you-have-to-be-informed-about-dream-interpretations/
Enjoyed every bit of your article.Really looking forward to read more. Really Cool.
https://www.elt-holdings.com/en/product_show/drk65zvtercwo/Ashtray-Plastic-Parts
Great blog post. Keep writing.
https://www.cokohardware.com
I blog quite often and I really thank you for your content.The article has truly peaked my interest. I’m going to bookmark your blogand keep checking for new information about once per week.I subscribed to your RSS feed too.
It’s in reality a nice and useful piece of information.I am happy that you simply shared this useful information with us.Please stay us informed like this. Thank you for sharing.
https://atavi.com/share/w3f8a7zkadgg
I’ll right away seize your rss as I can’t to find your email subscription link or e-newsletter service.Do you have any? Please permit me understand so that I could subscribe.Thanks.
https://geograffity.com/post/716414285447872512/dive-deeper-with-clear-vision-the-ultimate-guide
fantastic points altogether, you simply received a brand new reader. What might you suggest about your put up that you made a few days in the past? Any certain?
I’ll right away grasp your rss feed as I can’t in finding your email subscription link or e-newsletter service. Do you’ve any? Please let me recognise so that I could subscribe. Thanks.
https://www.complaintsboard.com/noel-meza-attorney-san-diego-unethical-attorney-services-c1583489
You made several fine points there. I did a search on the topic and found a good number of people will have the same opinion with your blog.
https://te.legra.ph/Implementing-Artificial-Intelligence-In-Cybersecurity-06-06-2
VvlfQb This blog was how do I say it? Relevant!! Finally I have found something that helped me. Cheers!
https://cutt.ly/gww5aYQq
Would you be all for exchanging hyperlinks?
https://slides.com/taylor59521
Nicely put, Regards!how to write argument essay writing dissertations help write personal statement
https://permitdeutsch.com/se/service/kop-korkort/
When I initially commented I clicked the “Notify me when new comments are added” checkbox and now each time a comment is added I get four emails with the same comment. Is there any way you can remove people from that service? Cheers!
https://permitdeutsch.com/service/fuhrerschein-kaufen/
Enjoyed every bit of your blog.Much thanks again. Really Cool.
Really appreciate you sharing this article post. Awesome.
https://damoaberry.com
What’s up, yup this article is actually nice and I have learned lot of things from it regarding blogging.thanks.
Great, thanks for sharing this post.Really thank you! Will read on…
https://www.fastechcircuit.com
Thank you for your blog article.Really looking forward to read more.
https://www.torvenics.com/fpc_connectors
Thanks-a-mundo for the article.Much thanks again. Really Great.
https://www.hginstrument.com/level-controller/rf-admittance-level-switch
Great, thanks for sharing this blog.Really looking forward to read more. Much obliged.
https://www.sbssibo.com/1-water-bladder/
Very nice post. I just stumbled upon your blog and wished to say that I have truly enjoyed surfing around your blog posts. After all I’ll be subscribing to your rss feed and I hope you write again soon!
https://weeklycasinos.com
Hey There. I found your blog using msn. Thisis a really well written article. I’ll be sure to bookmark it and come back to read more of youruseful info. Thanks for the post. I’ll certainly return.
http://www.professoronline.net/profile/nemtuptpoof704
Fantastic tips. Thanks a lot!essays about college education writing paper help custom thesis writing
http://market-fin.site/story.php?id=24297
This is a really good tip particularly to those new to the blogosphere.Brief but very accurate information… Many thanks for sharing this one.A must read article!
http://eukallos.edu.ba/
I do not even know how I ended up here, but I thought this post was good. I do not know who you are but certainly you’re going to a famous blogger if you are not already 😉 Cheers!
https://onearchersplace.net/
ivermectin oral solution ivermectin 4000 mcg – ivermectin over the counter canada
https://tradingforexnow.com/
Major thanks for the blog.Really thank you! Fantastic.
https://www.minsenslight.com/products/warehouse-and-factory-round-ufo-led-high-bay-light-120w-ip65-waterproof-outdoor
Appreciate this post. Let me try it out.Feel free to surf to my blog post; cannabis vodka
https://shangsalcedoplacemakati.com/
free slots games free slots games free slotsLoading…
https://www.openlearning.com/u/rossencramer-rwdv72/blog/TradeStocksFree
Heya i am for the primary time here. I found this board and I find It truly helpful & it helped me out a lot. I’m hoping to present something again and help others such as you aided me.
https://bookmarkfeeds.stream/story.php?title=landscape-lighting-austin#discuss
A motivating discussion is definitely worth comment. I do believe that youneed to write more about this issue, it might not be a taboo matter but usually people do not talk about such issues.To the next! Best wishes!!
http://budtrader.com/arcade/members/geeseoffice49/activity/2995025/
Great blog article.Thanks Again. Much obliged.
https://remoteiot.com/
What’s up colleagues, how is all, and what you want tosay regarding this post, in my view its genuinely amazing in support of me.
http://universalsteps.online/story.php?id=27831
Very good blog article.Much thanks again. Much obliged.
Muchos Gracias for your blog post. Keep writing.
https://rush-one.net/products/E5A5B3E69E9CE5878DOralJellyP-ForceE99B99E69588E5A881E8808CE98BBC160mg7E585A5E8A39DE78EABE791B0E58FA3E591B3-648be78566011a46.html
They call it the “self-censor”, simply because you’re too self-conscious of your writing, too judgmental.
https://t.co/DJfWQXBU3f
Thanks, I have recently been looking for information about this topic for a while and yours is the best I’ve discovered till now. However, what in regards to the bottom line? Are you certain concerning the source?
https://letterboxd.com/TannerHicks/
Thanks again for the post.Really thank you!
https://www.zoeyexporting.com/product/jewelry-laser-w
Looking forward to reading more. Great post.Really looking forward to read more. Really Great.
https://rivertzhou.csublogs.com/25270006/stearin-secrets
Looking forward to reading more. Great blog article.Really looking forward to read more. Really Great.
https://cashwjlk395061.blogacep.com/24772348/the-best-side-of-india-visa
It is really a great and useful piece of info. I am glad that yousimply shared this helpful info with us. Please stay us up to datelike this. Thanks for sharing.
http://users.atw.hu/jesusdesciples/index.php?mod=users&action=view&id=1081560
It is extremely nice to see the greatest details presented in an easy and understanding manner
https://github.com/phpboiler
Im thankful for the blog article.Thanks Again.
https://www.marklifeprinter.com/
Thanks for sharing, this is a fantastic blog.Thanks Again. Want more.
https://www.marklifeprinter.com/
A big thank you for your article.Thanks Again.
https://eternainternational.com
Enjoyed every bit of your blog article.Much thanks again. Fantastic.
https://www.medlonchina.com/powerblade-connector.html
but with the PlayStation 4, upcoming games. So clenbuterol
https://cutt.us/yAMIl
Great post. I was checking constantly this blog and I am impressed!Very useful info specially the last part 🙂 I care for such info much.I was looking for this particular information for a very long time.Thank you and best of luck.
http://controlc.com/0fa4870d
I’ll right away grab your rss feed as I can’t find your e-mail subscription hyperlink or newsletter service.Do you’ve any? Please allow me realize in order that I may subscribe.Thanks.
https://testosil-side-effects.blogspot.com/2023/06/maximizing-your-workout-results.html
Really appreciate you sharing this article.Really thank you! Fantastic.
https://www.beautychemical.com/Products/Trichloroisocyanuric-acid_06.html
what are the side effects of norvasc side effect of amlodipine besylate
Im thankful for the blog post.Thanks Again. Really Cool.
https://www.chinatopmarketing.com/blog/129.html
Hey, thanks for the blog.Really looking forward to read more. Keep writing.
https://www.upupergrow.com/product/inner/id/4-inch-rockwool-cubes.html
When I initially commented I clicked the “Notify me when new comments are added” checkbox and now each timea comment is added I get three emails with the same comment.Is there any way you can remove me from that service?Thank you!
https://maddox-haslund.federatedjournals.com/water-slide-rentals-los-gatos-for-extraordinary-fun
Hello! I simply wish to offer you a big thumbs up for your excellent info you have here on this post. I am coming back to your blog for more soon.
http://drivedreams.website/story.php?id=30793
Greetings! Very useful advice in this particular post! It is the little changes that will make the greatest changes. Thanks a lot for sharing!
https://www.google.cf/url?q=https://www.biloxibouncehouse.com/pascagoula-bounce-house-and-waterslides/
Sweet blog! I found it whike surfing around on Yahoo News. Do you haveany suggestions on hhow to get listed in Yahoo News?I’ve been trying for a while but I never seem to get there!Thank you
http://tsvetelina.site/story.php?id=29603
Really appreciate you sharing this article post.Really thank you!
https://www.anclighting.com/product/fp10010-custom-large-crystal-cloth-chandelier/
Really enjoyed this blog.
https://spriteshield.com
Hi there! I just want to give you a big thumbs up for your great information you have got here on this post. I’ll be returning to your blog for more soon.
wow, awesome blog post.Much thanks again. Really Cool.
https://n.pisopanalo.ph/
el otro dia entre a omegle y sin cámara ni nada tipo solo chathice q un viejo acabe
https://objective-ferret-f4803c.mystrikingly.com/blog/add-a-blog-post-title-f8908d16-ecd3-46b9-b292-9804034dc28c
Very neat article post.Thanks Again. Awesome.
https://kuafotiyu.com/
Hey, thanks for the post.Really looking forward to read more. Much obliged.
https://n.pisopanalo.ph/
Thank you ever so for you article post.Really thank you! Keep writing.
https://www.senmobrew.com/Product/Distillery-equipment_010.html
What’s Happening i am new to this, I stumbled upon this I’ve found It positively useful and it has aided meout loads. I am hoping to give a contribution & help different customers like its helpedme. Great job.
https://listophile.com/names/last/unique/
In fact when someone doesn’t understand then its up toother viewers that they will help, so here it takes place.
https://pagan.com.ua/privitannya/garni-privitannia-z-dnem-narodjennia-sysidci-ykrainskou/
I came here to work cataflam dd efectos secundarios DAVOS, Switzerland – Countries must devote more resources to fight global extremism, U.S
Muchos Gracias for your blog article. Great.
https://liuxuewenping.com/
What’s up i am kavin, its my first occasion to commenting anyplace, when i read this piece of writing i thought i could also make comment due to this sensible paragraph.
https://www.packersauthenticofficialstore.com/binaural-beats-get-a-set-of-earphones-and-discover-ways-to-meditate-easily.html
Thanks for every other great article. The place else may just anyone get that kind of information in such aperfect way of writing? I have a presentation subsequent week, and I’m on the searchfor such info.
https://www.apollo.io/people/Todd/Karamian/60c2f2ce05e4410001c8a761
Thanks for sharing, this is a fantastic blog article.Much thanks again. Much obliged.
https://www.arixlash.com/PRODUCTS/Strip-Eyelashes_019.html
I’m no longer sure the place you are getting your info, but good topic.I must spend some time learning more orfiguring out more. Thanks for great info I used to be searching forthis information for my mission.
modafinil order can modafinil cause itching hives how long does it take for provigil to take effect
https://www.circusberzercus.co.uk/
I’m still learning from you, as I’m trying to reach my goals. I absolutely enjoy reading all that is written on your blog.Keep the aarticles coming. I loved it!
https://ventsmagazine.com/2023/06/14/the-success-of-youth-empowerment-programs/
You could certainly see your skills in the work you write. The world hopes for more passionate writers like you who aren’t afraid to say how they believe. Always go after your heart.
A round of applause for your blog article.Really thank you! Much obliged.
https://maniac-book.ru/user/metertoast93/
Aw, this was an incredibly nice post. Taking a few minutes and actual effortto produce a superb article… but what can I say… I procrastinate a whole lot and don’t seem to get nearly anything done.
http://ericampire.art/story.php?id=28788
An intriguing discussion is definitely worth comment. I do believe that you ought to publish more about this issue, it might not be a taboo subject but typically people do not talk about such issues. To the next! Cheers!!
https://techychemist.com/the-evolution-of-nintendo-from-playing-cards-to-pioneering-video-games/
There’s noticeably a bundle to know about this. I assume you made sure nice factors in options also.
https://thegadgetflow.com/user/rarisriothink
I loved your article.Really looking forward to read more. Will read on…
https://www.hengyitek.com/product/pigment-orange-73/
Amazing! Its in fact awesome article, I have gotmuch clear idea on the topic of from this article.
https://myonlinestudybuddy.com/members/chiefseal4/activity/302465/
Do you have a spam problem on this blog; I also am a blogger, and I was wanting to know your situation; many of us have created some nice practices and we are looking to exchange methods with other folks, be sure to shoot me an email if interested.
http://newgoodsforyou.org/2023/07/27/redefining-places-the-pros-of-automated-entry/
Thanks again for the article. Want more.
https://lukaselptx.izrablog.com/1700685/the-5-second-trick-for-navel-piercing
great issues altogether, you simply gained a brand new reader. What may you suggest about your publish that you just made some days in the past? Any positive?
https://jumpshare.com/v/yHX3TwinDMuUdEtpDBQk
I loved your blog post.Really thank you! Awesome.
https://augustzfkmq.creacionblog.com/20956253/the-2-minute-rule-for-tattoo-cream
Hello, this weekend is fastidious designed for me, because thispoint in time i am reading this enormous educational post hereat my residence.Here is my blog; balcony privacy cover
https://mensvault.men/story.php?title=bistrovozvodimie-zdaniya-v-samare#discuss
Say, you got a nice blog article. Great.
https://collagen84838.suomiblog.com/rumored-buzz-on-india-evisa-35982901
I really like and appreciate your post.Thanks Again. Will read on…
https://reidvdjmp.glifeblog.com/23056439/about-microsoft-office-professional-plus-2021-product-key
A big thank you for your post. Cool.
https://www.hongyongmachinery.com/products/OEM-Precision-Carton-Steel-Casting-Part-Lost-Wax-Casting-Part-3270521.html
Thanks-a-mundo for the post.Thanks Again. Keep writing.
https://www.creatingway.com/carbon-fiber-sheet-cnc-machining/
Very good article.Thanks Again. Really Cool.
https://rotontek.com
I wanted to thank you for this great read!! I certainly loved every little bit of it. I have got you saved as a favorite to check out new things you postÖ
https://weheardit.stream/story.php?title=casino-demo-indonesia#discuss
Thanks for sharing, this is a fantastic article post.Really looking forward to read more. Great.
https://www.panda-admission.com
Im thankful for the blog article. Awesome.
https://iptvgithubm3u.com
I really liked your article post.Really looking forward to read more. Will read on…
http://www.minoo-cn.com
Hi friends, how is all, and what you desire to say regarding this paragraph, in my view its actually amazing in favor of me.
https://rudee11.com/
Thanks for the post. Much obliged.
https://www.speed-doors.com
erectile dysfunction treatment options – medications for ed ed pills otc
https://apps.apple.com/us/app/sunglow-pier-tides/id6456524113
A big thank you for your article.Really thank you! Awesome.
https://www.greenpetcare.com.cn/Pet-Products/Cat-litter_07.html
if you snort klonopin taking remeron and klonopin prescribed both xanax and klonopin
https://stripclubstampa.com/
Thanks-a-mundo for the blog article.Much thanks again. Fantastic.
https://telegramim.com
is chloroquine phosphate over the counter hydroxychloroquine acheter who makes chloroquine phosphate
https://articlesjust4you.com/froggy-hops-helps-make-the-most-from-bounce-house-rentals/
Very nice post. I just stumbled upon your blog and wished to say that I’ve reallyenjoyed browsing your blog posts. In any case I’ll be subscribing toyour rss feed and I hope you write again very soon!
https://androidstreamingservice.com/
Awesome blog.Really looking forward to read more. Really Cool.
https://forum.mamotoja.pl/special/albums/532803-jak-wybraC487-kasyno
hydroxychloroquine effectiveness clonopine meaning
https://burke-gunn-2.hubstack.net/a-few-methods-for-passing-the-enrolled-agent-exam-on-your-first-try
Thanks for some other fantastic article. Where else may just anybody get that type of info in such aperfect manner of writing? I’ve a presentation next week, and I am at thesearch for such info.
https://www.acusmatica.net/cursos-produccion-musical/masters-y-cursos-anuales/curso-tecnico-de-sonido-y-produccion-musical/
Im obliged for the blog article.Thanks Again. Keep writing.
https://nutrition62726.blogozz.com/23360325/the-basic-principles-of-car-rentals-in-madurai
Thank you ever so for you blog article.Thanks Again. Much obliged.
https://caidencghcw.blogoxo.com/19541362/facts-about-kamagra-review-revealed
Major thankies for the blog post.Thanks Again. Much obliged.
https://trevortgpbl.blogs-service.com/50422671/facts-about-online-hotel-booking-revealed
I am so grateful for your post.Much thanks again. Really Great.
https://pleval.com/product-category/jump-rope/pvc-rope/
Thank you for your post.Really thank you! Will read on…
https://troyrdnli.webdesign96.com/24549551/examine-this-report-on-madhur-morning-chart
Thanks a lot for the article post. Will read on…
https://net7708474.dailyblogzz.com/21962856/detailed-notes-on-painting-company-in-nagpur
Fantastic article.Really thank you! Cool.
https://schooladmissioninbhopal24688.dbblog.net/51800669/the-5-second-trick-for-door-mosquito-net-with-magnet
Really enjoyed this article. Much obliged.
https://nutrition62727.ivasdesign.com/43868526/little-known-facts-about-delhi-local-sightseeing-tour-packages
This is one awesome blog article. Cool.
https://hlj.fun
Great, thanks for sharing this blog article.Really thank you! Really Great.
https://www.metooo.io/u/64de1a75205b86115b2665fa
Awesome blog post. Want more.
http://www.lftdzd.com/en/scg/lifting-beam.html
Great blog.Really looking forward to read more. Great.
https://www.anclighting.com/fishing-floor-lamps/
I value the article post. Awesome.
https://creatine61504.pages10.com/the-5-second-trick-for-pvc-interlocking-floor-tiles-58191451
Thank you for your article post.Really looking forward to read more.
https://net7708474.dailyblogzz.com/22925396/the-greatest-guide-to-camping-in-rishikesh
Hey, thanks for the article.Really looking forward to read more. Cool.
https://caidenugtck.blogripley.com/23160715/not-known-factual-statements-about-click-here-to-read
Really enjoyed this blog article.Thanks Again. Want more.
https://tysondmptw.dm-blog.com/23016916/how-navigate-to-this-website-can-save-you-time-stress-and-money
Major thankies for the blog article.Much thanks again. Really Cool.
https://www.nide-international.com/about-gid-3.html
I really enjoy the post.Really looking forward to read more. Want more.
https://www.pdf12345678.com/
Thanks for sharing, this is a fantastic blog article.Really thank you! Much obliged.
https://www.jcanatomy.com/
I really liked your blog.Much thanks again. Great.
https://www.boliwiremesh.com/product/Others-Products.html
Thanks again for the article post.Much thanks again. Much obliged.
https://www.bydfi.com
Very good blog article.Thanks Again. Cool.
https://mbti38268.laowaiblog.com/22990177/the-best-side-of-andaman-nicobar-trip
Very good post. Keep writing.
https://mbti63692.suomiblog.com/the-definitive-guide-to-top-online-chatting-apps-38401702
wow, awesome blog. Cool.
https://judahjznyj.bloggactivo.com/23073923/an-unbiased-view-of-bbmp-khata-transfer-process
Really informative article post.Much thanks again. Cool.
https://twitter.com/Hmall_world
wow, awesome blog article.Really looking forward to read more. Cool.
https://andersonboan43108.thezenweb.com/future-choice-hospitality-tips-60715193
I value the blog post. Awesome.
https://www.learneroo.com/users/57061
Hey, thanks for the blog.Much thanks again. Really Cool.
https://andyxlxk32098.mysticwiki.com/386350/world777_is_punter_friendly_cricket
Really informative article post.Really looking forward to read more. Really Great.
https://www.kubetworld.com
Thank you for your article.Really looking forward to read more. Will read on…
https://crushon.ai/
Major thankies for the article post. Fantastic.
https://www.wozuibao.com/
I cannot thank you enough for the article.Really looking forward to read more. Really Great.
https://nsfwgenerator.ai/
Muchos Gracias for your article.Thanks Again. Will read on…
https://undress-ai.app/
Thanks so much for the article.Much thanks again. Cool.
https://forum.abantecart.com/index.php?action=profile;u=93788
Im obliged for the article.Much thanks again. Keep writing.
https://damienka7kg.shotblogs.com/the-ultimate-guide-to-laptop-under-20000-37161756
Awesome blog.Much thanks again. Will read on…
https://wheyprotein16160.blogvivi.com/24308231/about-police-verification
Im grateful for the post.Really thank you! Really Great.
https://chart-studio.plotly.com/~SONU25415
I really liked your blog article.Thanks Again. Really Great.
https://brookswrjbt.blogprodesign.com/45161066/the-assam-apsc-diaries
Awesome blog.Really looking forward to read more. Cool.
https://www.chocolateok.com/chocolate-tool/
Fantastic blog.Really thank you!
https://aichatting.ai/
I think this is a real great article.Really thank you!
https://undress.vip/
Thank you for your article post.Thanks Again. Much obliged.
https://mbti23295.blogocial.com/5-essential-elements-for-online-it-training-60347454
Really informative blog.Really thank you! Will read on…
https://manuelszdhl.tinyblogging.com/the-ultimate-guide-to-stores-for-men-s-fashion-67493668
Thanks so much for the blog.Really thank you! Really Great.
https://griffinrdgnw.jiliblog.com/82201158/not-known-factual-statements-about-goa-taxi-service
Really informative blog post.Thanks Again. Keep writing.
https://cab-service-in-goa25791.bleepblogs.com/25126852/little-known-facts-about-cab-service-in-goa
Very neat article.Thanks Again. Awesome.
https://weiliandahome.com/
I appreciate you sharing this blog.Really thank you! Want more.
https://www.hominers.com/
Very good article post.Thanks Again. Will read on…
https://www.favcomic.com/r18
Enjoyed every bit of your blog post.Much thanks again. Really Great.
https://builder-in-nagpur31967.tblogz.com/top-latest-five-builder-in-nagpur-urban-news-39035664
Really appreciate you sharing this post.Really thank you! Much obliged.
https://gunnertgpyh.p2blogs.com/24572291/facts-about-cricket-updates-india-revealed
I am so grateful for your post.Really thank you! Want more.
https://cashnfhjm.ttblogs.com/4143989/facts-about-banjara-market-online-revealed
Fantastic blog.Thanks Again. Much obliged.
https://titusbpdp54219.azuria-wiki.com/515699/down_under_dreams_unveiling_the_wonders_of_australia_for_tourists
Thanks for sharing, this is a fantastic post.Really looking forward to read more. Really Great.
https://josueeoxfn.blog-eye.com/24876503/the-5-second-trick-for-packers-and-movers-panchkula
Looking forward to reading more. Great post.Really looking forward to read more. Will read on…
https://dungeonborne.com
I loved your article.Much thanks again.
https://goldslotplay.com/
Discover my dirty side! A lady in free and a nympho in bed!
Thanks-a-mundo for the blog.Really thank you! Much obliged.
https://pulseersport.com/
I value the blog article. Really Great.
https://crushon.ai/trends/nsfw_character_ai
I cannot thank you enough for the blog article. Fantastic.
https://www.algaecidetechnologies.com/
I am so grateful for your article post.Thanks Again. Really Cool.
https://aspireapplianceservices.in/expert-air-conditioner-maintenance/
Awesome blog post.Really looking forward to read more. Cool.
https://www.rs-fastener.com
Thanks so much for the article.Thanks Again. Want more.
https://xparkles.com
Really informative blog.Thanks Again. Keep writing.
https://www.americanninjawarriornation.com/users/resortinNainital
Really informative article post.Much thanks again. Really Great.
https://nsfws.ai/
Based on my research, after a property foreclosure home is marketed at an auction, it is common for any borrower to still have the remaining unpaid debt on the financial loan. There are many loan providers who seek to have all fees and liens cleared by the future buyer. Nevertheless, depending on certain programs, laws, and state regulations there may be several loans that are not easily sorted out through the exchange of personal loans. Therefore, the responsibility still lies on the consumer that has got his or her property in foreclosure process. Thank you for sharing your thinking on this web site.
https://store.winningpc.com/
Советуем посетить сайт Антипушкин https://antipushkin.ru/
Также не забудьте добавить сайт в закладки: https://antipushkin.ru/
I?ve been exploring for a little bit for any high quality articles or blog posts in this sort of area . Exploring in Yahoo I finally stumbled upon this web site. Reading this info So i?m happy to show that I’ve a very excellent uncanny feeling I discovered exactly what I needed. I such a lot for sure will make certain to do not disregard this site and give it a glance regularly.
https://newfacebeauty.pl/prostownice-na-podczerwien
I truly appreciate this blog post.Really looking forward to read more. Fantastic.
https://www.us-machines.com/
Very good article.Really looking forward to read more. Keep writing.
https://daxtromn-power.com/products/special-offer-daxtromn-power-mppt-4.2kw-hybrid-solar-inverter-24vdc-batteryless-working-pv-input-90-450v-grid-tie-hybrid-solar-inverter-48v-220v-120-450vdc-140a-mppt-solar-controller-dual-ouput-photovoltaic-inverter
A round of applause for your post.Really thank you!
https://www.us-machines.com/
Really informative post.Thanks Again. Great.
https://bingoplus.net.ph
Really appreciate you sharing this article.Thanks Again. Much obliged.
https://crushon.ai/
Thank you for your article post. Really Great.
https://tangtoutiaosite.com/
Major thankies for the article. Keep writing.
https://www.koluse.com/
Thank you ever so for you blog.Much thanks again.
https://undressai.cc
Really enjoyed this article post.Really thank you! Want more.
https://www.lunaproxy.com
A big thank you for your post.Really thank you! Fantastic.
https://www.panmin.com.es
Thanks for sharing, this is a fantastic article post.Really looking forward to read more. Want more.
https://www.paidusolar.com
Very neat article post. Awesome.
https://casinoplus.net.ph
Thanks-a-mundo for the post. Keep writing.
https://cncmachining-custom.com
Im grateful for the blog article.Really looking forward to read more.
https://gpt-free.ai/
Im obliged for the post. Will read on…
https://smashorpass.app/
wow, awesome blog article.Really thank you! Will read on…
https://crushon.ai/
I am so grateful for your blog article.Much thanks again. Awesome.
https://crushon.ai/character/19133f53-77e1-4a1f-a44d-9d6fbb5d62d3/chat
I think this is a real great article post.Really thank you! Fantastic.
https://crushon.ai/
Really appreciate you sharing this blog article.Thanks Again. Really Cool.
https://cncmachining-custom.com
Thanks so much for the blog.Thanks Again. Awesome.
https://creatiodesign.net
I appreciate you sharing this blog.Really thank you! Awesome.
https://www.wikitrade.com/en/news-commodities/1.html
This is one awesome article post.Really looking forward to read more. Fantastic.
https://www.findalocallawyer.com
I really like and appreciate your blog article.Really thank you! Really Cool.
https://www.kubet.fyi/
Thanks for the blog post. Really Cool.
https://bonitocase.com/
A big thank you for your blog post.Really looking forward to read more. Cool.
https://www.oneuedu.com/visa
One more issue is that video gaming has become one of the all-time most significant forms of excitement for people of various age groups. Kids play video games, and adults do, too. Your XBox 360 has become the favorite video games systems for those who love to have a lot of video games available to them, and who like to experiment with live with other folks all over the world. Thanks for sharing your thinking.
https://tsyianjs.com/productinfo/1108492.html
Simply wish to say your article is as astonishing. The clarity for your submit is simply nice and that i can think you are a professional on this subject. Fine along with your permission allow me to seize your feed to keep updated with coming near near post. Thank you one million and please keep up the enjoyable work.
https://www.steelstructure-building.com/pid18209310/Indonesia-Double-Storey-prefabricated-Steel-Structure-Workshop-With-Warehouse-And-Office.htm
Come closer and on a fun but naughty ride!
Thank you for another magnificent post. Where else could anyone get that type of information in such a perfect way of writing? I’ve a presentation next week, and I’m on the look for such info.
http://himasta.fsm.undip.ac.id/wp-content/hasta/
Almanya medyum haluk hoca sizlere 40 yıldır medyumluk hizmeti veriyor, Medyum haluk hocamızın hazırladığı çalışmalar ise bağlama büyüsü ve aşık etme büyüsü , Konularında en iyi sonuç ve kısa sürede yüzde yüz için bizleri tercih ediniz. İletişim: +49 157 59456087
https://medyum.carrd.co/
Unquestionably believe that that you said. Your favourite justification seemed to be at the web the simplest thing to take note of. I say to you, I definitely get annoyed while people consider concerns that they just do not recognize about. You controlled to hit the nail upon the top and also outlined out the entire thing with no need side-effects , people could take a signal. Will likely be back to get more. Thank you
http://himasta.fsm.undip.ac.id/wp-content/hasta/
magnificent points altogether, you just gained a brand new reader. What would you recommend about your post that you made some days ago? Any positive?
https://puspa.kemenpppa.go.id/nahan-berak/?maghrib=mawartoto20rtp20slot
Thanks for the several tips contributed on this website. I have observed that many insurance agencies offer shoppers generous discount rates if they decide to insure several cars with them. A significant amount of households currently have several autos these days, specifically those with more aged teenage young children still residing at home, and also the savings on policies can easily soon begin. So it will pay to look for a great deal.
https://crypto-jackpots.com
Things i have seen in terms of personal computer memory is the fact there are specs such as SDRAM, DDR and many others, that must go with the specific features of the motherboard. If the personal computer’s motherboard is very current while there are no operating system issues, modernizing the ram literally will take under one hour. It’s one of many easiest laptop or computer upgrade techniques one can think about. Thanks for giving your ideas.
https://crypto-jackpots.com
Almanya medyum haluk hoca sizlere 40 yıldır medyumluk hizmeti veriyor, Medyum haluk hocamızın hazırladığı çalışmalar ise berlin medyum papaz büyüsü, Konularında en iyi sonuç ve kısa sürede yüzde yüz için bizleri tercih ediniz. İletişim: +49 157 59456087
https://medyumlar.simdif.com/
I really enjoy the article.Really looking forward to read more. Keep writing.
https://casinoplus.net.ph/
I value the blog article.Really looking forward to read more. Much obliged.
https://faceswapapp.ai/
Yet another thing I would like to express is that instead of trying to suit all your online degree courses on days of the week that you end work (because most people are fatigued when they return home), try to have most of your sessions on the saturdays and sundays and only 1 or 2 courses for weekdays, even if it means taking some time away from your weekend break. This pays off because on the saturdays and sundays, you will be far more rested plus concentrated on school work. Thanks a bunch for the different suggestions I have realized from your weblog.
https://tribratanews.madiun.jatim.polri.go.id/news/?
Aw, this was a really nice post. In idea I want to put in writing like this moreover ? taking time and precise effort to make an excellent article? but what can I say? I procrastinate alot and on no account seem to get one thing done.
https://myonlinebillboard.com/industry-case-studies/furniture-advertising-using-business-news-storys/
Say, you got a nice blog.Thanks Again. Much obliged.
https://crushon.ai/
Great beat ! I would like to apprentice while you amend your site, how could i subscribe for a blog web site? The account helped me a acceptable deal. I had been tiny bit acquainted of this your broadcast provided bright clear idea
https://myonlinebillboard.com/industry-case-studies/martial-arts-advertising-using-tv-streaming/
Im obliged for the post.Much thanks again. Great.
https://spicychat-ai.online/
Really enjoyed this article post.Really looking forward to read more. Cool.
https://crushon.ai/
I really enjoy the blog post.Really looking forward to read more. Will read on…
https://finewatchcare.com/|https://finewatchcare.com/collections
Thanks-a-mundo for the post.Much thanks again. Much obliged.
https://crushon.ai/
Say, you got a nice article. Will read on…
https://tycent520.com
Really informative blog post.Really looking forward to read more. Will read on…
https://zhongli998.com
Say, you got a nice blog article.Much thanks again. Will read on…
https://www.temporaryfencesales.ca
Thanks for this excellent article. Yet another thing to mention is that a lot of digital cameras come equipped with any zoom lens that allows more or less of that scene to be included by ‘zooming’ in and out. These changes in {focus|focusing|concentration|target|the a**** length are reflected while in the viewfinder and on significant display screen on the back of your camera.
https://korankaltara.com/akatoto-jadi-dandim-bulungan-danrem-ingatkan-penanganan-covid-19
I?m impressed, I must say. Actually hardly ever do I encounter a weblog that?s each educative and entertaining, and let me tell you, you have got hit the nail on the head. Your idea is outstanding; the difficulty is something that not sufficient people are speaking intelligently about. I’m very happy that I stumbled throughout this in my seek for something relating to this.
https://magister.psikologi.unpad.ac.id/wp-includes/Text/?Link=MAWARTOTO
I’ve been surfing online greater than three hours as of late, yet I by no means found any fascinating article like yours. It?s beautiful price sufficient for me. In my view, if all web owners and bloggers made just right content material as you did, the internet might be much more helpful than ever before.
https://korankaltara.com/akatoto-jadi-dandim-bulungan-danrem-ingatkan-penanganan-covid-19
I?d have to examine with you here. Which isn’t one thing I usually do! I get pleasure from reading a post that may make individuals think. Also, thanks for permitting me to comment!
https://lwccareers.lindsey.edu/profiles/4363039-oneplay168-online-casino
Hi, I think your site might be having browser compatibility issues. When I look at your blog site in Safari, it looks fine but when opening in Internet Explorer, it has some overlapping. I just wanted to give you a quick heads up! Other then that, great blog!
https://juaraku.jayabaya.ac.id/mahasiswa/?googleads=mawartoto
Hello are using WordPress for your site platform? I’m new to the blog world but I’m trying to get started and create my own. Do you require any coding knowledge to make your own blog? Any help would be really appreciated!
https://juaraku.jayabaya.ac.id/mahasiswa/?googleads=mawartoto
Many thanks for this article. I’d personally also like to express that it can often be hard if you find yourself in school and starting out to initiate a long credit ranking. There are many individuals who are just trying to live and have an extended or favourable credit history can often be a difficult thing to have.
https://stpaulkatni.edu.in/forums/users/oneplay168casino/
Really appreciate you sharing this blog article. Want more.
https://www.temporary-fence.com.au
When I originally commented I clicked the -Notify me when new feedback are added- checkbox and now each time a comment is added I get 4 emails with the same comment. Is there any approach you can take away me from that service? Thanks!
https://siembahpora.jabarprov.go.id/obj/products/mawartoto/
One more thing I would like to express is that rather than trying to suit all your online degree lessons on days and nights that you finish off work (since the majority of people are tired when they get home), try to obtain most of your sessions on the saturdays and sundays and only a few courses on weekdays, even if it means a little time away from your saturday and sunday. This is really good because on the week-ends, you will be much more rested as well as concentrated in school work. Many thanks for the different suggestions I have discovered from your blog.
https://siembahpora.jabarprov.go.id/obj/products/mawartoto/
Really informative blog article.Really looking forward to read more. Want more.
https://www.temporaryfencesales.ca
Major thanks for the post.Much thanks again. Keep writing.
https://animegenerator.ai/
Güvenilir bir danışman için medyum nasip hocayı seçin en iyi medyum hocalardan bir tanesidir.
https://mez.ink/berlinmedyum
Im obliged for the blog.Really looking forward to read more. Want more.
https://nsfwgenerator.ai/
The following time I read a blog, I hope that it doesnt disappoint me as much as this one. I mean, I do know it was my option to read, but I really thought youd have one thing interesting to say. All I hear is a bunch of whining about one thing that you can repair in case you werent too busy searching for attention.
https://juaraku.jayabaya.ac.id/mahasiswa/?googleads=mawartoto
Great, thanks for sharing this blog.Much thanks again. Great.
https://fouadmods.net/
Muchos Gracias for your article. Much obliged.
https://chat.openai.com/g/g-0faZCnuDx-devin-ai
Looking forward to reading more. Great blog. Much obliged.
https://www.yinraohair.com/wigs/shop-by-occasion/workplace
Güvenilir bir danışman için medyum nasip hocayı seçin en iyi medyum hocalardan bir tanesidir.
https://waqar-news.de/berlin-medyum-ein-ort-des-friedens-und-der-gelassenheit/
Very informative post. Great.
https://www.yinraohair.com/human-hair/front-lace-wig
Excellent goods from you, man. I have understand your stuff previous to and you’re just extremely fantastic. I actually like what you have acquired here, certainly like what you are stating and the way in which you say it. You make it entertaining and you still care for to keep it wise. I can not wait to read much more from you. This is really a terrific website.
https://www.fiverr.com/freeson/create-100-000-blog-comment-backlinks-using-scrapebox
Thanks a lot for the post.Thanks Again. Great.
https://tysonymzl43109.is-blog.com/31268097/the-advantage-of-pest-control-service
hello there and thanks in your info ? I?ve certainly picked up anything new from proper here. I did however experience a few technical points the usage of this site, as I skilled to reload the website many times previous to I could get it to load properly. I have been wondering if your web host is OK? Now not that I’m complaining, however sluggish loading cases times will often impact your placement in google and could injury your high-quality score if ads and ***********|advertising|advertising|advertising and *********** with Adwords. Well I am including this RSS to my e-mail and can look out for a lot more of your respective fascinating content. Make sure you update this again soon..
https://www.fiverr.com/freeson/create-100-000-blog-comment-backlinks-using-scrapebox
wow, awesome blog post.Thanks Again. Great.
https://www.mmamania.com/users/kamshetparagliding
This is one awesome blog.Really looking forward to read more. Keep writing.
https://trentontohw88754.smblogsites.com/25377408/occupational-english-test
Enjoyed every bit of your blog article.Much thanks again. Great.
https://www.usms.ac.ma
Thanks, I’ve been hunting for information about this topic for ages and yours is the best I’ve discovered so far.
https://mtpolice.kr/eba8b9ed8a80eca09cebb3b4/
Советуем посетить сайт https://balkonnaya-dver.ru/
Также не забудьте добавить сайт в закладки: https://balkonnaya-dver.ru/
I’ve learned result-oriented things out of your blog post. Yet another thing to I have found is that in many instances, FSBO sellers will certainly reject you. Remember, they will prefer not to ever use your expert services. But if an individual maintain a gentle, professional romance, offering support and keeping contact for around four to five weeks, you will usually be capable of win an interview. From there, a listing follows. Thanks
https://lppm.unusida.ac.id/ruri-fadhilah-kurniati/
Thanks for one’s marvelous posting! I actually enjoyed reading it, you’re a great author.I will always bookmark your blog and will often come back from now on. I want to encourage one to continue your great writing, have a nice day!
https://lppm.unusida.ac.id/medya-ayunda-fitri/
Heya i?m for the first time here. I found this board and I find It truly useful & it helped me out a lot. I hope to give something back and help others like you aided me.
https://mtpolice.kr/eba8b9ed8a80eca09cebb3b4/
wow, awesome blog article.Much thanks again. Keep writing.
https://www.detroitbadboys.com/users/carbodycoverwaterproof
Very good article post. Really Great.
https://lukasocqc09875.wikipublicist.com/4323646/the_advantage_of_taxi_services
I really enjoy the article.Thanks Again. Want more.
https://worldlistpro.com/story18258178/a-simple-key-for-best-korean-skin-care-products-unveiled
I appreciate you sharing this blog.Thanks Again. Will read on…
https://connervfhde.thezenweb.com/case-study-how-proper-flange-selection-can-impact-project-success-62900888
Güvenilir bir danışman için medyum nasip hocayı seçin en iyi medyum hocalardan bir tanesidir.
https://www.authortalking.com/spirituelle-beratung-und-lebenshilfe-medyum-nasip-hodja-im-fokus/
I truly appreciate this blog.Thanks Again. Awesome.
https://franciscokxlw87542.blogdigy.com/home-appliances-products-39702913
Great, thanks for sharing this article post.Thanks Again. Keep writing.
https://codyixlw87643.arwebo.com/48927144/the-benefit-using-home-interiors-manufacturer
Güvenilir bir danışman için medyum nasip hocayı seçin en iyi medyum hocalardan bir tanesidir.
https://gesellschaftnews.de/geheimnisse-des-okkultismus-entdecken-sie-die-dienstleistungen-von-medyumnasip-com/
Enjoyed every bit of your post.Really thank you! Fantastic.
https://socialbookmarkgs.com/story16901271/everything-about-pest-control-services-in-ahmedabad-price
I really like and appreciate your blog.Much thanks again. Cool.
https://wernerk782teh3.blogitright.com/profile
Thanks-a-mundo for the article.Really thank you! Fantastic.
https://webnamedirectory.com/listings12670405/about-pvc-locking-floor-tiles
Magnificent goods from you, man. I’ve understand your stuff previous to and you are just too great. I really like what you’ve acquired here, really like what you’re saying and the way in which you say it. You make it enjoyable and you still care for to keep it sensible. I cant wait to read far more from you. This is really a great website.
https://bislog.fisip.unpad.ac.id/wp-includes/css/?Link=MAWARTOTO
What an eye-opening and thoroughly-researched article! The author’s meticulousness and capability to present complicated ideas in a comprehensible manner is truly commendable. I’m thoroughly captivated by the breadth of knowledge showcased in this piece. Thank you, author, for providing your wisdom with us. This article has been a game-changer!
https://pa-kualapembuang.go.id/-/?miss=MAWARTOTO
Thank you for any other excellent article. The place else may anyone get that kind of info in such a perfect means of writing? I’ve a presentation subsequent week, and I am at the look for such info.
https://bislog.fisip.unpad.ac.id/wp-includes/css/?Link=MAWARTOTO
Write more, thats all I have to say. Literally, it seems as though you relied on the video to make your point. You obviously know what youre talking about, why waste your intelligence on just posting videos to your site when you could be giving us something enlightening to read?
https://pa-kualapembuang.go.id/-/?miss=MAWARTOTO
Güvenilir bir danışman için medyum haluk hocayı seçin en iyi medyum hocalardan bir tanesidir.
https://www.renovation.directory/directory/listing/medyumhalukhoca
Major thanks for the blog post.Really looking forward to read more.
https://crushon.ai/
Güvenilir bir danışman için medyum haluk hocayı seçin en iyi medyum hocalardan bir tanesidir.
https://www.lifeatsml.com/articles/medyumhalukhoca
I loved your article post.Really thank you! Fantastic.
https://crushon.ai/
I appreciate, cause I found exactly what I was looking for. You have ended my four day long hunt! God Bless you man. Have a nice day. Bye
https://perpustakaan.sman12bandung.sch.id/wp-content/uploads/?amp=akatoto
I loved as much as you will receive carried out right here. The sketch is tasteful, your authored material stylish. nonetheless, you command get bought an shakiness over that you wish be delivering the following. unwell unquestionably come further formerly again as exactly the same nearly very often inside case you shield this hike.
https://perpustakaan.sman12bandung.sch.id/wp-content/uploads/?amp=akatoto
Fantastic blog article. Great.
https://www.laifentech.com/
I really enjoy the article.Really thank you! Really Great.
https://www.aidevin.ai
Im obliged for the blog article.Thanks Again. Will read on…
https://www.chaguanersite.com/
I do like the manner in which you have framed this specific concern and it does indeed supply me personally some fodder for thought. On the other hand, because of what precisely I have experienced, I simply just hope as other commentary pack on that people remain on point and in no way start on a soap box associated with some other news of the day. Anyway, thank you for this fantastic piece and though I do not necessarily concur with this in totality, I regard the standpoint.
https://sister.ubibanyuwangi.ac.id/exototo.html
Thanks for your blog post. What I would like to contribute is that personal computer memory ought to be purchased should your computer can’t cope with what you do along with it. One can put in two RAM boards with 1GB each, as an illustration, but not certainly one of 1GB and one with 2GB. One should make sure the car maker’s documentation for the PC to make sure what type of storage it can take.
https://sister.ubibanyuwangi.ac.id/exototo.html
I appreciate you sharing this article post.Really thank you! Cool.
https://www.orangenews.hk
Definitely imagine that that you stated. Your favorite reason seemed to be on the net the simplest thing to have in mind of. I say to you, I definitely get irked while other folks consider worries that they just don’t realize about. You controlled to hit the nail upon the top as neatly as outlined out the entire thing without having side-effects , other people can take a signal. Will likely be back to get more. Thanks
https://kosmos.bogorkab.go.id/css/?traffic=link+mawartoto
I really like and appreciate your post.Really thank you! Awesome.
https://inspro2.com/
I would like to thank you for the efforts you have put in writing this site. I’m hoping the same high-grade web site post from you in the upcoming as well. In fact your creative writing abilities has encouraged me to get my own website now. Really the blogging is spreading its wings fast. Your write up is a good example of it.
https://kosmos.bogorkab.go.id/css/?traffic=mawartoto+login
These days of austerity and also relative anxiety about running into debt, lots of people balk resistant to the idea of employing a credit card in order to make purchase of merchandise or pay for any gift giving occasion, preferring, instead just to rely on the tried in addition to trusted approach to making settlement – hard cash. However, if you possess cash there to make the purchase entirely, then, paradoxically, this is the best time for you to use the credit card for several reasons.
https://landforsale.in.th/hotel-for-sale-chiang-mai/
We are offering Concrete Parking Lot Contractor, Concrete Installation Contractor Service, warehouse flooring, commercial, and industrial concrete roadways.
http://1stConcreteContractor.com
Wow, great blog post.Really looking forward to read more. Awesome.
https://talkietalkie.ai/
Aw, this was a really nice post. In idea I wish to put in writing like this additionally ? taking time and precise effort to make a very good article? but what can I say? I procrastinate alot and not at all appear to get one thing done.
https://www.skycheats.com/
We are offering Concrete Parking Lot Contractor, Concrete Installation Contractor Service, warehouse flooring, commercial, and industrial concrete roadways.
http://1stConcreteContractor.com
Thanks for the article.Much thanks again. Awesome.
https://atop-education.degree
I really appreciate this post. I?ve been looking everywhere for this! Thank goodness I found it on Bing. You’ve made my day! Thank you again
https://www.skycheats.com/
You could definitely see your expertise in the work you write. The world hopes for even more passionate writers like you who are not afraid to say how they believe. Always follow your heart.
https://whitleylawfirm.com/raleigh-car-accident-lawyer/
Fantastic blog post.Really thank you! Will read on…
https://nsfw-ai.chat/
Thanks for sharing your ideas. The one thing is that scholars have an option between government student loan plus a private education loan where it is easier to go for student loan consolidating debts than through the federal education loan.
http://ftp.gabriellelim.com/products/mawarslot.html
Hi, Neat post. There is a problem with your web site in internet explorer, would check this? IE still is the market leader and a good portion of people will miss your excellent writing because of this problem.
https://whitleylawfirm.com/raleigh-car-accident-lawyer/
The root of your writing while appearing agreeable initially, did not work well with me after some time. Someplace within the paragraphs you actually managed to make me a believer but just for a while. I nevertheless have got a problem with your leaps in assumptions and you would do well to fill in all those gaps. If you can accomplish that, I would definitely be amazed.
http://ftp.gabriellelim.com/products/mawarslot.html
Enjoyed every bit of your post.Really thank you! Keep writing.
https://nsfws.ai/
Im thankful for the blog article. Much obliged.
https://crushon.ai/
Definitely believe that which you said. Your favorite reason appeared to be on the web the simplest thing to be aware of. I say to you, I certainly get annoyed while people think about worries that they just don’t know about. You managed to hit the nail upon the top as well as defined out the whole thing without having side effect , people can take a signal. Will likely be back to get more. Thanks
https://myonlinebillboard.com/the-best-usa-tv-ads/advertise-on-hbo-max-in-carson-ca/
I have noticed that over the course of developing a relationship with real estate entrepreneurs, you’ll be able to come to understand that, in each and every real estate contract, a commission is paid. In the end, FSBO sellers never “save” the payment. Rather, they struggle to win the commission by way of doing a strong agent’s work. In the process, they devote their money and also time to execute, as best they’re able to, the duties of an real estate agent. Those jobs include displaying the home through marketing, presenting the home to buyers, creating a sense of buyer urgency in order to induce an offer, scheduling home inspections, handling qualification inspections with the financial institution, supervising fixes, and assisting the closing.
https://myonlinebillboard.com/the-best-usa-tv-ads/advertise-on-cnn-in-yakima-wa/
There’s noticeably a bundle to learn about this. I assume you made certain good factors in features also.
https://www.liveprivates.com/perfinfo.php?performerid=Maya&psid=eveyou&pstour=t1&utm_source=lc_global
I’m amazed by the quality of this content! The author has obviously put a huge amount of effort into exploring and arranging the information. It’s inspiring to come across an article that not only gives valuable information but also keeps the readers captivated from start to finish. Kudos to her for making such a brilliant work!
https://www.livejasmin.com/en/girls/milf?forcedesktop=1&psid=eveyou&more=447738946624220992
wow, awesome blog post.Thanks Again. Really Cool.
https://summerseasiren.com/collections/period-underwear
I truly appreciate this article post.Much thanks again.
https://lorenzolzmk42109.vigilwiki.com/5993107/how_to_reach_andaman_and_nicobar_islands
One thing I’d really like to say is the fact before getting more pc memory, take a look at the machine in which it would be installed. Should the machine is actually running Windows XP, for instance, a memory threshold is 3.25GB. Using in excess of this would easily constitute any waste. Make sure one’s motherboard can handle this upgrade amount, as well. Thanks for your blog post.
https://siakad.unik-cipasung.ac.id/date/04/-/?mhs=RTP20MAWARTOTO
Aw, this was a very nice post. In concept I want to put in writing like this additionally ? taking time and actual effort to make a very good article? but what can I say? I procrastinate alot and certainly not appear to get something done.
http://115.178.54.92/konten_web/css/mawartoto/
Nice blog right here! Also your website rather a lot up fast! What web host are you the usage of? Can I get your associate link in your host? I wish my site loaded up as quickly as yours lol
http://115.178.54.92/konten_web/css/mawartoto/
Thanks-a-mundo for the blog.Really thank you! Awesome.
https://andersonbpcn43209.digiblogbox.com/51329818/duct-cleaning-services
I truly appreciate this article post.Really thank you! Keep writing.
https://checkthisout65184.daneblogger.com/25467384/elevating-critical-care-devadoss-hospitals-leading-the-way-in-madurai
Hey! I simply want to give a huge thumbs up for the nice information you could have here on this post. I can be coming back to your weblog for extra soon.
https://www.renjiemedical.com/product/home-nursing-bedelectric-home-nursing-bedmanual-home-nursing-bed/
One other issue issue is that video games are normally serious as the name indicated with the primary focus on understanding rather than leisure. Although, there’s an entertainment aspect to keep the kids engaged, every game is usually designed to work on a specific skill set or course, such as mathmatical or scientific discipline. Thanks for your publication.
https://spbu.smartcity.kotaprabumulih.go.id/-/?anehin=mawartoto
Hey There. I found your blog using msn. This is a very well written article. I will make sure to bookmark it and return to read more of your useful info. Thanks for the post. I will definitely return.
https://sexy-fantasy.com/collections/vibrators/products/seductive-vibrator-1st-generation
Really appreciate you sharing this article.Really thank you! Much obliged.
https://emilianovkyl43109.muzwiki.com/6739709/what_is_osha_courses_online
I really like what you guys are up too. This type of clever work and exposure! Keep up the terrific works guys I’ve you guys to my own blogroll.
https://spbu.smartcity.kotaprabumulih.go.id/-/?anehin=mawartoto
Thanks for revealing your ideas with this blog. Additionally, a delusion regarding the banking institutions intentions when talking about property foreclosure is that the financial institution will not take my installments. There is a specific amount of time that the bank will take payments from time to time. If you are too deep within the hole, they will commonly call that you pay the payment in full. However, i am not saying that they will have any sort of installments at all. Should you and the financial institution can be capable to work something out, a foreclosure process may cease. However, in the event you continue to pass up payments in the new approach, the foreclosure process can just pick up exactly where it left off.
https://spbu.smartcity.kotaprabumulih.go.id/-/?anehin=mawartoto
Awesome blog post.Thanks Again. Really Great.
https://augustshwhr.blogolenta.com/22080372/unveiling-romantic-escapes-maldives-honeymoon-packages
Really informative blog post. Fantastic.
https://lorenzoqblsb.blog4youth.com/25138697/nebosh-international-general-certificate-things-to-know-before-you-buy
I really like and appreciate your article post.Much thanks again. Awesome.
https://andyznam43108.birderswiki.com/566129/the_advantage_using_best_payroll_software
Hmm it looks like your site ate my first comment (it was extremely long) so I guess I’ll just sum it up what I had written and say, I’m thoroughly enjoying your blog. I as well am an aspiring blog writer but I’m still new to the whole thing. Do you have any helpful hints for beginner blog writers? I’d really appreciate it.
http://115.178.54.92/konten_web/css/mawartoto/
I have come across that nowadays, more and more people are increasingly being attracted to camcorders and the issue of digital photography. However, as a photographer, you should first invest so much time deciding which model of photographic camera to buy and also moving store to store just so you may buy the most economical camera of the trademark you have decided to choose. But it won’t end right now there. You also have to consider whether you can purchase a digital camera extended warranty. Thanks alot : ) for the good points I received from your blog site.
https://louissycg07306.timeblog.net/61946151/from-pixels-to-engage-in-your-guidebook-to-navigating-the-world-of-on-the-net-gaming
Major thanks for the article.Much thanks again. Really Cool.
https://arenaplus.ph/
Thank you for another informative blog. Where else could I get that kind of info written in such an ideal way? I’ve a project that I am just now working on, and I have been on the look out for such info.
https://tribratanews.sukabumi.jabar.polri.go.id/mawartoto/
I am so grateful for your blog article.
https://www.sonhungbac.com/
Hiya, I am really glad I have found this information. Nowadays bloggers publish only about gossips and web and this is really irritating. A good blog with exciting content, that is what I need. Thanks for keeping this site, I will be visiting it. Do you do newsletters? Can’t find it.
http://115.178.54.92/konten_web/css/mawartoto/
Hey, thanks for the article.Thanks Again. Will read on…
https://baixicans.com/
I really like and appreciate your article post.Really looking forward to read more. Want more.
https://atop-education.degree/
I have learned result-oriented things as a result of your site. One other thing I would really like to say is that often newer laptop or computer os’s are likely to allow extra memory to be utilized, but they furthermore demand more ram simply to run. If someone’s computer is not able to handle much more memory and the newest software package requires that ram increase, it might be the time to buy a new Computer system. Thanks
https://tribratanews.demak.jateng.polri.go.id/wp-includes/mawartoto/
One thing I have actually noticed is always that there are plenty of beliefs regarding the banking companies intentions when talking about property foreclosure. One delusion in particular is that often the bank desires your house. Your banker wants your money, not the house. They want the amount of money they gave you having interest. Preventing the bank will only draw a foreclosed summary. Thanks for your publication.
https://siakad.unik-cipasung.ac.id/date/04/-/?mhs=MAWARTOTO
I cannot thank you enough for the post.Really looking forward to read more. Keep writing.
https://gbdownload.cc/
Appreciate you sharing, great article.Much thanks again. Cool.
https://fouadmods.net/
As I website possessor I believe the content matter here is rattling fantastic , appreciate it for your hard work. You should keep it up forever! Best of luck.
https://siakad.unik-cipasung.ac.id/date/04/-/?mhs=MAWARTOTO
A round of applause for your blog.Much thanks again. Want more.
https://gbdownload.cc/
I absolutely love your blog and find a lot of your post’s to be just what I’m looking for. Does one offer guest writers to write content for you personally? I wouldn’t mind composing a post or elaborating on a few of the subjects you write about here. Again, awesome blog!
https://sadakemis.bandungbaratkab.go.id/uploads/user/2024-03-30-082733.916117mawartoto.html/
Together with the whole thing that appears to be building within this specific area, many of your opinions tend to be quite radical. Having said that, I beg your pardon, but I do not subscribe to your entire strategy, all be it radical none the less. It would seem to everybody that your opinions are generally not entirely rationalized and in reality you are generally your self not even thoroughly certain of the assertion. In any case I did appreciate examining it.
https://officiallostmary.org
Thanks a lot for the article post.Thanks Again. Keep writing.
https://fouadmods.net/
Nice blog here! Also your website rather a lot up fast! What web host are you the use of? Can I am getting your affiliate hyperlink in your host? I desire my website loaded up as quickly as yours lol
https://officiallostmary.org
Thank you for your blog article.Much thanks again. Keep writing.
https://nsfwgenerator.ai/
I truly appreciate this article.Really thank you! Awesome.
http://animegenerator.ai/
Hey there! Quick question that’s completely off topic. Do you know how to make your site mobile friendly? My website looks weird when viewing from my apple iphone. I’m trying to find a template or plugin that might be able to fix this problem. If you have any recommendations, please share. With thanks!
https://www.flumpebble.org
I think this is a real great article post.Really looking forward to read more. Fantastic.
https://bookmarkspring.com/story11458279/revamp-your-living-space-with-high-quality-commercial-living-room-furniture
Good day! Would you mind if I share your blog with my twitter group? There’s a lot of folks that I think would really appreciate your content. Please let me know. Cheers
https://administrasi.bandung.lan.go.id/
One thing is that one of the most widespread incentives for utilizing your credit card is a cash-back or rebate supply. Generally, you’ll receive 1-5 back on various purchases. Depending on the card, you may get 1 back on most purchases, and 5 again on expenses made going to convenience stores, gasoline stations, grocery stores as well as ‘member merchants’.
http://36.67.50.122/docs/mawartoto/
Heya i am for the first time here. I came across this board and I to find It really useful & it helped me out a lot. I hope to provide something back and aid others like you aided me.
https://www.flumpebble.org
Hey, thanks for the article.Much thanks again. Keep writing.
https://deanuv9yv.blogs100.com/25577025/explore-the-serene-beauty-of-ooty-with-our-bangalore-to-ooty-tour-packages
When I initially commented I clicked the “Notify me when new comments are added” checkbox and now each time a comment is added I get several e-mails with the same comment. Is there any way you can remove people from that service? Bless you!
http://36.67.50.122/docs/mawartoto/
Major thankies for the blog post.Really looking forward to read more. Awesome.
https://shanepp8ol.blogprodesign.com/46988855/stay-updated-with-live-cricket-scores-on-myfinal11-in
Thanks for your information on this blog. Just one thing I would choose to say is the fact that purchasing electronic products items through the Internet is not something new. In fact, in the past decades alone, the market for online electronics has grown substantially. Today, you can find practically almost any electronic gadget and product on the Internet, including cameras plus camcorders to computer elements and game playing consoles.
https://www.elfbarflavors.org
This is a excellent blog, might you be involved in doing an interview about how you created it? If so e-mail me!
https://dkbp3a.pangandarankab.go.id/tests/Feature/situs/?pages=MAWARTOTO
What i don’t realize is actually how you are not actually much more well-liked than you may be now. You are very intelligent. You realize therefore significantly relating to this subject, produced me personally consider it from a lot of varied angles. Its like men and women aren’t fascinated unless it?s one thing to accomplish with Lady gaga! Your own stuffs excellent. Always maintain it up!
https://dkbp3a.pangandarankab.go.id/tests/Feature/situs/?pages=MAWARTOTO
Awesome blog.Thanks Again. Want more.
https://cruzwxxv12456.ouyawiki.com/544700/the_advantage_of_satta_matka_game
Thank you ever so for you blog. Cool.
https://milohuiv87542.sasugawiki.com/6207614/the_benefit_using_interior_designers
Hi, Neat post. There is a problem with your web site in internet explorer, might test this? IE still is the marketplace chief and a good portion of folks will leave out your great writing due to this problem.
https://disdukcapil.boltimkab.go.id/.well-known/files/?upload=sengtoto20wap
One thing I want to say is before getting more computer memory, look at the machine in which it could be installed. Should the machine is actually running Windows XP, for instance, a memory limit is 3.25GB. Setting up above this would merely constitute a new waste. Be sure that one’s motherboard can handle the actual upgrade quantity, as well. Thanks for your blog post.
http://103.169.26.186:89/apki/plugin/css/sengtoto/
I value the article.Thanks Again. Fantastic.
https://www.hommar.com/products-47108
Hey there just wanted to give you a quick heads up. The words in your article seem to be running off the screen in Opera. I’m not sure if this is a format issue or something to do with web browser compatibility but I thought I’d post to let you know. The design and style look great though! Hope you get the problem fixed soon. Cheers
http://103.169.26.186:89/apki/plugin/toto/mawartoto/
That is the appropriate weblog for anybody who desires to search out out about this topic. You understand so much its almost hard to argue with you (not that I really would need?HaHa). You positively put a brand new spin on a topic thats been written about for years. Great stuff, just great!
http://103.169.26.186:89/apki/plugin/toto/mawartoto/
A big thank you for your blog article. Really Cool.
https://www.kol.kim/custom-design/
Thanks-a-mundo for the article post.Really looking forward to read more. Really Cool.
https://www.hommar.com/video/products-detail-665078
A person essentially help to make seriously articles I would state. This is the first time I frequented your web page and thus far? I surprised with the research you made to make this particular publish extraordinary. Wonderful job!
https://4kaerial.com.au/
wow, awesome article post. Awesome.
https://crushon.ai/
I loved as much as you will receive carried out right here. The sketch is tasteful, your authored subject matter stylish. nonetheless, you command get got an impatience over that you wish be delivering the following. unwell unquestionably come more formerly again as exactly the same nearly a lot often inside case you shield this increase.
https://dkbp3a.pangandarankab.go.id/tests/Feature/situs/?pages=Mawarslot
Hey there! This is kind of off topic but I need some guidance from an established blog. Is it tough to set up your own blog? I’m not very techincal but I can figure things out pretty quick. I’m thinking about setting up my own but I’m not sure where to begin. Do you have any points or suggestions? Appreciate it
https://umkm.tubaba.go.id/assets/-/?pages=mawartoto
Say, you got a nice blog.Much thanks again. Really Cool.
https://keeperaitest.com/
fantastic points altogether, you simply gained a new reader. What would you recommend in regards to your post that you made a few days ago? Any positive?
https://ikm.dinsos.pringsewukab.go.id/css/?traffic=mawartoto+login+login
Awesome blog.Really looking forward to read more. Will read on…
https://crushon.ai/character/7573a4cc-a7fc-4c3b-9b11-0f296d2bde95/details?not-for-all-audiences=true&utm_medium=home
Oh my goodness! an incredible article dude. Thank you However I am experiencing concern with ur rss . Don?t know why Unable to subscribe to it. Is there anyone getting identical rss problem? Anyone who knows kindly respond. Thnkx
https://ikm.dinsos.pringsewukab.go.id/css/?traffic=mawartoto+login+login
Really informative blog article. Awesome.
https://spicychat-ai.online/
I really enjoy the article post. Really Great.
https://crushon.ai/
Thanks a lot for the post.Much thanks again. Want more.
http://www.bsaa.edu.ru/bitrix/rk.php?goto=https://remoteiot.com/how-to-remote-access-raspberry-pi.html
Thank you for the good writeup. It in truth used to be a leisure account it. Look complicated to far introduced agreeable from you! However, how can we communicate?
https://rsabdhifamili.com/max/?judul=mawartoto
Muchos Gracias for your post.Really looking forward to read more. Awesome.
https://crushon.ai/
This is one awesome blog article.Really looking forward to read more. Cool.
https://crushon.ai/
Together with almost everything that appears to be developing throughout this specific subject material, many of your opinions are generally fairly stimulating. On the other hand, I appologize, because I can not give credence to your entire idea, all be it refreshing none the less. It would seem to us that your comments are generally not totally validated and in actuality you are generally your self not fully certain of your point. In any case I did take pleasure in reading through it.
https://acitya.mayasaribakti.ac.id/files/?siauhe=MAWARTOTO
One more thing I would like to state is that rather than trying to suit all your online degree courses on days of the week that you conclude work (considering that people are drained when they return home), try to obtain most of your sessions on the weekends and only a couple of courses on weekdays, even if it means taking some time away from your saturdays. This pays off because on the saturdays and sundays, you will be extra rested plus concentrated on school work. Thanks for the different tips I have acquired from your blog.
https://rsabdhifamili.com/max/?judul=mawartoto
A round of applause for your blog post. Fantastic.
https://smashorpass.app/
When I originally commented I clicked the -Notify me when new feedback are added- checkbox and now each time a comment is added I get 4 emails with the same comment. Is there any manner you can take away me from that service? Thanks!
https://www.apply.candler.emory.edu/?tunnel=mawartoto
Thanks again for the blog post.Much thanks again. Cool.
https://www.kol.kim/custom-design/
I have read a few good stuff here. Certainly worth bookmarking for revisiting. I surprise how much effort you put to make such a magnificent informative site.
http://36.67.50.122/docs/MAWARTOTO/
Wonderful blog! I found it while browsing on Yahoo News. Do you have any tips on how to get listed in Yahoo News? I’ve been trying for a while but I never seem to get there! Appreciate it
https://www.apply.candler.emory.edu/?tunnel=mawartoto
Enjoyed every bit of your blog post.Much thanks again. Really Cool.
https://www.yinraohair.com/wigs/shop-by-style/short-silky-straight-wigs
I?ve been exploring for a little bit for any high-quality articles or blog posts on this sort of area . Exploring in Yahoo I at last stumbled upon this web site. Reading this info So i am happy to convey that I have a very good uncanny feeling I discovered just what I needed. I most certainly will make sure to do not forget this web site and give it a glance on a constant basis.
https://www.breezeflavors.com
Another thing I have really noticed is that for many people, low credit score is the result of circumstances above their control. For instance they may be really saddled with illness and because of this they have substantial bills for collections. It may be due to a work loss and the inability to work. Sometimes separation and divorce can truly send the finances in the undesired direction. Thanks sharing your opinions on this blog.
http://36.67.50.122/docs/MAWARTOTO/
I really liked your article post.Really thank you! Really Great.
https://www.yinraohair.com/human-hair/clip-ins
A round of applause for your post. Want more.
https://www.yinraohair.com/cosplay/shop-by-color
Thank you for this article. I might also like to talk about the fact that it can end up being hard when you’re in school and starting out to initiate a long credit score. There are many pupils who are just simply trying to pull through and have a lengthy or good credit history can often be a difficult element to have.
https://mawartotoofficial.com/
wow, awesome blog.Really looking forward to read more. Awesome.
https://www.metalfenceworks.com/e_products/Crowd-Control-Barrier–11.html
Im thankful for the article.Much thanks again. Fantastic.
https://blog.huddles.app
I feel that is one of the most significant information for me. And i am glad reading your article. But should commentary on few common issues, The site style is great, the articles is truly great : D. Just right job, cheers
https://stocktwits.com/SitusSlotGacorHariIni2
I really enjoy the blog article.Really looking forward to read more. Awesome.
https://blog.huddles.app
The subsequent time I read a weblog, I hope that it doesnt disappoint me as a lot as this one. I mean, I know it was my choice to read, however I really thought youd have something interesting to say. All I hear is a bunch of whining about one thing that you may repair if you happen to werent too busy searching for attention.
https://speakerdeck.com/slotonline28
Do you mind if I quote a few of your posts as long as I provide credit and sources back to your weblog? My blog is in the exact same niche as yours and my visitors would genuinely benefit from some of the information you present here. Please let me know if this ok with you. Regards!
https://www.breezeflavors.com
You can certainly see your skills in the work you write. The world hopes for even more passionate writers like you who aren’t afraid to say how they believe. Always follow your heart.
https://setdako.pangkalpinangkota.go.id/.well-known/files/?bre=MINITOTO20WAP
I have realized that in video cameras, extraordinary receptors help to {focus|concentrate|maintain focus|target|a**** automatically. The actual sensors involving some camcorders change in contrast, while others make use of a beam involving infra-red (IR) light, specifically in low lumination. Higher specs cameras at times use a mixture of both devices and probably have Face Priority AF where the camera can ‘See’ a face while focusing only upon that. Thank you for sharing your opinions on this website.
https://setdako.pangkalpinangkota.go.id/.well-known/files/?bre=MINITOTO20WAP
I appreciate you sharing this post. Great.
https://umhom13.com
Hi there I am so excited I found your site, I really found you by error, while I was researching on Aol for something else, Nonetheless I am here now and would just like to say thanks for a remarkable post and a all round entertaining blog (I also love the theme/design), I don’t have time to look over it all at the minute but I have saved it and also added your RSS feeds, so when I have time I will be back to read a great deal more, Please do keep up the fantastic work.
https://setdako.pangkalpinangkota.go.id/.well-known/files/?bre=minitoto
This is without a doubt one of the best articles I’ve read on this topic! The author’s thorough knowledge and zeal for the subject are apparent in every paragraph. I’m so grateful for finding this piece as it has deepened my knowledge and sparked my curiosity even further. Thank you, author, for taking the time to create such a phenomenal article!
https://setdako.pangkalpinangkota.go.id/.well-known/files/?bre=minitoto
Fantastic article.Thanks Again. Will read on…
https://umhom13.com
Excellent goods from you, man. I’ve understand your stuff previous to and you are just extremely wonderful. I really like what you have acquired here, certainly like what you are saying and the way in which you say it. You make it entertaining and you still care for to keep it smart. I can’t wait to read much more from you. This is really a tremendous site.
https://128.199.107.179/
Greetings! I’ve been reading your site for some time now and finally got the courage to go ahead and give you a shout out from Humble Tx! Just wanted to say keep up the fantastic work!
https://128.199.107.179/
I am so grateful for your blog post. Really Great.
https://honista.io/
Im grateful for the blog article.Really thank you! Keep writing.
https://honista.io/
I appreciate you sharing this article post. Fantastic.
https://honorcase.com/
Thanks-a-mundo for the article.Really thank you! Keep writing.
https://blog.huddles.app
Really enjoyed this blog.Really thank you! Great.
https://www.hkcashwebsite.com
Thank you ever so for you blog.Really looking forward to read more. Really Great.
https://aura-circle.com/collections/aura-sleep-mask-collection
Wow, fantastic blog layout! How long have you been blogging for? you made blogging look easy. The overall look of your web site is magnificent, as well as the content!
https://acitya.mayasaribakti.ac.id/files/?siauhe=MAWARTOTO
I truly appreciate this blog post.Really thank you! Fantastic.
https://aura-circle.com/
Magnificent beat ! I would like to apprentice while you amend your web site, how can i subscribe for a blog web site? The account aided me a acceptable deal. I had been tiny bit acquainted of this your broadcast offered bright clear idea
http://hydevapes.org/
Thanks a lot for the blog article.Really looking forward to read more. Awesome.
https://x.yupoo.com/photos/lireplica/categories/2958183
As a nursing student balancing classroom and clinical rotations, I can’t emphasise enough the importance of trustworthy assignment assistance services. I’ve had numerous instances where Nursing Assignment Help has saved my life by helping me achieve deadlines without compromising quality.
Nursing Assignment Help
Hi, Neat post. There is a problem with your site in internet explorer, would check this? IE still is the market leader and a good portion of people will miss your excellent writing due to this problem.
http://hydevapes.org/
I value the article post.Really looking forward to read more. Awesome.
https://www.piaproxy.com
Really informative post.Much thanks again. Want more.
https://telagrnm.org
En iyi medyum olarak bir danışman için medyum haluk hocayı seçin en iyi medyum hocalardan bir tanesidir.
https://www.pexels.com/tr-tr/@medyum-berlin-1192396203/
Thanks for the different tips provided on this site. I have realized that many insurance firms offer shoppers generous discounts if they choose to insure many cars with them. A significant volume of households include several motor vehicles these days, in particular those with more mature teenage kids still dwelling at home, as well as savings for policies can certainly soon increase. So it makes sense to look for a good deal.
https://geekvape.org
Awesome blog.Thanks Again. Will read on…
https://telcgrnm.org/
Do you mind if I quote a couple of your posts as long as I provide credit and sources back to your weblog? My blog site is in the exact same area of interest as yours and my visitors would really benefit from a lot of the information you provide here. Please let me know if this ok with you. Appreciate it!
https://www.kangvapes.org/
Really informative article post.Thanks Again. Really Cool.
https://cncmachining-custom.com
Really appreciate you sharing this blog post.Much thanks again. Will read on…
https://www.pcbgogo.com/
Thanks again for the blog article.Really looking forward to read more. Great.
https://www.topbet.game/?ch=110019
Say, you got a nice blog.Much thanks again. Great.
https://www.sunany.com/
I have not checked in here for some time as I thought it was getting boring, but the last several posts are good quality so I guess I?ll add you back to my everyday bloglist. You deserve it my friend 🙂
https://www.canikusa.org/
A big thank you for your blog post.Much thanks again. Will read on…
https://www.haijiao.cn
Hey! I know this is kinda off topic nevertheless I’d figured I’d ask. Would you be interested in trading links or maybe guest authoring a blog article or vice-versa? My website covers a lot of the same topics as yours and I feel we could greatly benefit from each other. If you happen to be interested feel free to shoot me an email. I look forward to hearing from you! Wonderful blog by the way!
https://www.canikusa.org/
Hey, thanks for the blog.Much thanks again. Really Great.
https://www.haijiao.cn
Enjoyed every bit of your article.Really thank you! Much obliged.
https://www.kickstarter.com/profile/ewallettop365/about
Really informative blog article.Thanks Again. Will read on…
https://www.slsmachinery.com
Hi there would you mind sharing which blog platform you’re working with? I’m going to start my own blog soon but I’m having a difficult time choosing between BlogEngine/Wordpress/B2evolution and Drupal. The reason I ask is because your layout seems different then most blogs and I’m looking for something unique. P.S My apologies for getting off-topic but I had to ask!
https://www.canikusa.org/
I would like to thnkx for the efforts you have put in writing this blog. I am hoping the same high-grade site post from you in the upcoming also. Actually your creative writing abilities has inspired me to get my own blog now. Really the blogging is spreading its wings rapidly. Your write up is a great example of it.
https://feiramineiracutelaria.malab.com.br/
Really appreciate you sharing this article.Much thanks again. Want more.
https://www.sinco-machinery.com
Looking forward to reading more. Great blog article.Really looking forward to read more. Great.
https://www.jingpailianghao.com/
I liked up to you will receive performed proper here. The sketch is tasteful, your authored subject matter stylish. nevertheless, you command get got an edginess over that you wish be turning in the following. in poor health indubitably come further earlier once more since exactly the same nearly very often inside of case you defend this increase.
https://feiramineiracutelaria.malab.com.br/
Looking forward to reading more. Great blog article.Thanks Again. Really Great.
https://crushon.ai/
At this time it seems like Expression Engine is the preferred blogging platform available right now. (from what I’ve read) Is that what you’re using on your blog?
http://103.160.63.172/mawartoto/
I really liked your blog.Thanks Again. Great.
https://crushon.ai/
Im grateful for the post. Want more.
https://crushon.ai/
Just wish to say your article is as astonishing. The clearness for your publish is simply excellent and i could think you’re an expert in this subject. Well together with your permission allow me to grab your RSS feed to keep up to date with drawing close post. Thanks a million and please keep up the enjoyable work.
http://103.160.63.172/mawartoto/
Say, you got a nice blog.Really looking forward to read more. Really Great.
https://crushon.ai/
I really like and appreciate your article post.Really thank you! Will read on…
https://crushon.ai/
Really enjoyed this article.Much thanks again. Much obliged.
https://crushon.ai/
Thanks for the blog post.Thanks Again. Really Great.
https://crushon.ai/character/f5757531-9a53-4c38-85ef-cd5ae51cdc13/details
Im thankful for the post.Thanks Again. Really Cool.
https://crushon.ai/character/503eeebe-1626-45bf-89e9-8614106dc5ab/details
Im thankful for the blog article.Thanks Again. Great.
https://crushon.ai/character/b2e7751b-b890-4697-ab6b-09b273d08cc2/details
Great ? I should certainly pronounce, impressed with your site. I had no trouble navigating through all the tabs as well as related info ended up being truly simple to do to access. I recently found what I hoped for before you know it at all. Reasonably unusual. Is likely to appreciate it for those who add forums or something, website theme . a tones way for your client to communicate. Nice task..
https://afour.co.id/wp-content/assets/?harga=mawartoto
F*ckin? tremendous things here. I?m very glad to see your article. Thanks a lot and i am looking forward to contact you. Will you please drop me a e-mail?
http://103.55.216.51/top/?id=mawartoto
Muchos Gracias for your blog article.Much thanks again. Really Great.
https://crushon.ai/character/99c19d47-db59-4202-ad4a-d00c10edff2e/details
Really appreciate you sharing this post.Much thanks again.
https://aihentai.fun/
See What UK Onlyfans Pornstars Tricks The Celebs Are Making Use
Of Uk Onlyfans Pornstars
It is best to take part in a contest for the most effective blogs on the web. I’ll advocate this site!
https://afour.co.id/wp-content/assets/?harga=mawartoto
Do you mind if I quote a couple of your posts as long as I provide credit and sources back to your blog? My blog site is in the exact same niche as yours and my users would really benefit from some of the information you provide here. Please let me know if this alright with you. Many thanks!
http://103.55.216.51/top/?id=mawartoto
Thank you ever so for you post.Really thank you! Fantastic.
https://humanornot-ai.com/
Pretty section of content. I just stumbled upon your website and in accession capital to assert that I acquire in fact enjoyed account your blog posts. Anyway I will be subscribing to your feeds and even I achievement you access consistently rapidly.
https://kilaskata.com/wp-includes/assets/?hayo=mawartoto
You really make it seem so easy with your presentation but I find this matter to be actually something which I think I would never understand. It seems too complicated and extremely broad for me. I am looking forward for your next post, I?ll try to get the hang of it!
https://kilaskata.com/wp-includes/assets/?hayo=mawartoto
I really liked your blog.Thanks Again. Want more.
http://ai-gf.top/
Have you ever thought about including a little bit more than just your articles? I mean, what you say is valuable and all. Nevertheless think about if you added some great visuals or videos to give your posts more, “pop”! Your content is excellent but with pics and video clips, this website could certainly be one of the greatest in its niche. Excellent blog!
https://smpn7pekanbaru.sch.id/hause/?kia=MAWARTOTO
See What Personal Accident Attorney Tricks The Celebs Are Using personal accident Attorney [caper-cogefi.Com]
Thanks a lot for the article.Much thanks again. Really Cool.
https://talkietalkie.ai/
An attention-grabbing discussion is worth comment. I think that you should write more on this subject, it might not be a taboo topic however usually individuals are not enough to talk on such topics. To the next. Cheers
https://smpn7pekanbaru.sch.id/hause/?kia=MAWARTOTO
Very good article.Much thanks again. Really Great.
https://www.rmgbeauty.com/zh/news/2023-12-08/4370.html
Just want to say your article is as surprising. The clarity in your post is simply nice and i could assume you are an expert on this subject. Fine with your permission let me to grab your RSS feed to keep up to date with forthcoming post. Thanks a million and please continue the enjoyable work.
https://desabulurejo.gresikkab.go.id/vendor/css/?traffic=MAWARTOTO
Yesterday, while I was at work, my cousin stole my apple ipad and tested to see if it can survive a 40 foot drop, just so she can be a youtube sensation. My apple ipad is now destroyed and she has 83 views. I know this is totally off topic but I had to share it with someone!
https://desabulurejo.gresikkab.go.id/vendor/css/?traffic=MAWARTOTO
Really appreciate you sharing this blog.Much thanks again. Keep writing.
https://rizzgptapp.ai/
Major thankies for the blog post.Thanks Again. Really Cool.
https://janitorai.chat/
I have come to understand that rates for on-line degree specialists tend to be an awesome value. For instance a full College Degree in Communication in the University of Phoenix Online consists of Sixty credits with $515/credit or $30,900. Also American Intercontinental University Online provides a Bachelors of Business Administration with a full education course element of 180 units and a tuition fee of $30,560. Online studying has made getting the diploma so much easier because you can earn your degree from the comfort in your home and when you finish working. Thanks for all tips I have really learned through the website.
https://desabulurejo.gresikkab.go.id/vendor/css/?traffic=MAWARTOTO
I have recently started a blog, the information you offer on this web site has helped me greatly. Thanks for all of your time & work.
http://ftp.manuelacollis.com/
Hi, Neat post. There is a problem along with your site in internet explorer, could check this? IE nonetheless is the market leader and a huge component to other people will miss your excellent writing because of this problem.
https://desabulurejo.gresikkab.go.id/vendor/css/?traffic=MAWARTOTO
I appreciate you sharing this article.Thanks Again. Awesome.
https://www.recyclingmachine.vip/plastic-crusher-machine/
Really informative post.Thanks Again. Really Great.
https://pygmalion-ai.com/
Fantastic blog.Much thanks again. Really Great.
https://tartanconnect.cmu.edu/click?uid=c8c01438-d893-11e4-a071-0025902f7e74&r=https://remoteiot.com/blog/how-to-remotely-ssh-iot-device-in-web-browser.html
Major thanks for the blog article.Thanks Again. Really Great.
http://www.darkml.net/bbs/home.php?mod=space&uid=7940531
I really like and appreciate your blog post. Really Great.
https://www.dekingled.com
Hi, Neat post. There is a problem with your web site in web explorer, could check this? IE still is the marketplace chief and a huge portion of folks will miss your wonderful writing because of this problem.
http://ftp.manuelacollis.com/
Really appreciate you sharing this article post. Much obliged.
https://www.pyproxy.com
Thank you ever so for you post.Really thank you! Great.
https://vapzvape.com/
Great, thanks for sharing this article.Thanks Again. Really Great.
https://vapzvape.com/
Awesome article.Really looking forward to read more. Fantastic.
https://www.wavlinkstore.com
I appreciate you sharing this article.Thanks Again. Really Great.
https://www.vibratorfactory.com
Really enjoyed this article.Really thank you! Fantastic.
https://www.vibratorfactory.com
Almanya’nın En iyi medyum olarak bir danışman için medyum haluk hocayı seçin en iyi medyum hocalardan bir tanesidir.
https://globalcatalog.com/medyum2.de
Great, thanks for sharing this blog.Much thanks again. Cool.
https://honista.io/
Hello, i think that i saw you visited my weblog thus i came to ?return the favor?.I am trying to find things to enhance my web site!I suppose its ok to use a few of your ideas!!
https://jp100.sman1depoksleman.sch.id/index.php?judul=MAWARTOTO
Major thanks for the article.Really thank you! Want more.
https://honista.io/
Thank you for the sensible critique. Me & my neighbor were just preparing to do some research about this. We got a grab a book from our area library but I think I learned more clear from this post. I’m very glad to see such magnificent info being shared freely out there.
https://mawartoto.cicendoeyehospital.org/
Almanya’nın En iyi medyum olarak bir danışman için medyum haluk hocayı seçin en iyi medyum hocalardan bir tanesidir.
https://www.producthunt.com/@almanyamedyumu
of course like your website but you need to test the spelling on several of your posts. Many of them are rife with spelling issues and I in finding it very bothersome to inform the truth nevertheless I?ll certainly come back again.
https://jp100.sman1depoksleman.sch.id/index.php?judul=MAWARTOTO