CMS7417 – Autonomous and Autonomic Intelligent Systems
Introduction
Autonomous Intelligent Solutions are AI application software that work independently of continuous proper oversight, like self-driving vehicles, surveillance drones (UAVs), intelligent production machines, aged care robots, including virtual assistants for education as well as assistance. In unforeseen circumstances, computer systems are required to make sensible, intelligent, as well as sentient judgments. To maintain the essential respect on the aspect of human consumers, human decision-making should be comprehensible by human users as well as stakeholders.
When exploring the world, innovate new science and notice new events. Nasa can develop sophisticated missions. The instruments are vigorously developed. The capability to increase the large amount of data. The discovery of science can be performed which can require multiple spacecraft to occur. The discovery of science required the ground system which is at a high level. The pressure of mission cost which can be a logic base should be increased. The discovery of paradigms to the design of spacecraft that can support the discovery of science. Also the discovery of science tries to operate on mission concepts.
Benefits
The traffic control system is right now controlled automatically with the help of an automation system in the air traffic system. The automated process is nothing but a signal which is generating an automotive signal for the traffic controlation. This automation process helps to stop the traffic in any one direction and allows the others to further proceed. The automation for the air traffic control system has many qualities which is very beneficial for the traffic controllers and those qualities are firstly the eyesight and the colour vision is very strong in this system, then the ability of the concentration for a long time of period, next most important quality is problem resolution skill, next one is the coordination and the spatial awareness ability and the last one is communication skill and also the teamwork skill which is very important for any system. The potential of automated vehicles to travel into regions as well as circumstances wherein people cannot took is one of its advantages. This consists of checking dangerous areas, including as inside fission plants to look for weaknesses, as well as accessible places, including as within aero-engines. Robots as well as other traditional autonomous systems have the potential of extending as well as expanding on human skills. Commercial robot systems perform better in respect of strength as well as speed, while their assumed a major in industrial application are reliability as well as durability.The ability of automated vehicles to operate into locations as well as circumstances where people could is one of its benefits. This means inspecting hazardous situations, including as inside reactors to search for defects, as well as accessible places, including because within aero-engines.

To correspond to the layer of the spacecraft that should be compared with the autonomic loop which can be computing the system. (Zhu, et al. 2019)The programme of the self-execute to make the order with gateway solution. The algorithm execution depends on the collect progressive with human things. This should rule the engines which can be added to software. The approaches of gateway are most probably cloud bases which can increase the time under the response. The intelligence can be provided values which should be collected as part of the gateway. The main significance of the suitable architecture is that it is too efficient, versatile. Also, algorithms of deep learning should be efficient or may it be versatile. The gateway of edge should control the synthesis of the programmed. When the device management achieves the sense with high perfection then data should be interoperable. The difficulties should be one side to another side which can enable the elasticity of dynamic load which can be adopted in resource management. (Lam, et al. 2019) This needs the edge of automation. The solution that can be related to important adoption after that should be orchestration or may be to slice the resource or services. When selecting the dynamic load that should adopt the structure less device which is not possible. Some mission of the future that can indicate the source. The success of the source which should be required the autonomic properties. The concept of the mission that can specify the measure which should be passing the wave of gravity. The measurement of the distance which can differentiate widely falling of each spacecraft.
The nature of application
In the air traffic control system, the main three types of controller are tower controllers, then the next one is the terminal-radar-approach-controller and the last important controller is en-route-center-controller. The multiple uses of spacecraft in NASA. Which has been exploring their goal that enables the discovery of science? They can carry multi spacecraft, robotic missions in advance. Also they can communicate with new area, ground operations which can be coordinated. The most powerful instrument produced the most data to the success centre of control. The operation cost of control which contains great complications to the mission control. (H.K., et al.2019)The operator which can be controlled by mission. The significance of the challenges which require operating the streamline. The personnel can be required to control the spacecraft which is under control. The space technology of the millennium program is the technology which can be launched in 2005 and it is a ninety days mission. The goal is to reduce weight and size. After that the cost of the mission will be increasing to their capability. The technology can be accomplished which mapped the direction of intensity and magnetic. The magnetic field is the interior magnetosphere in the earth. It can use a cluster of two twenty four kilogram that under satellites. (Yang, et al. 2019) Every micro of the satellite contains a magnetometer. The allotted scientist can determine the effect of the magnetic field. The magnetic field can be an effect for the wind of solar or that may be other phenomena. The other satellite can be commended individually and try to commit the direct of the ground. The operation of the micro-sates is autonomously in advance. The command of pre programmed has to be considered as step autonomy and form automation. The commands cannot determine the goals that can be internal which recent conditions of the particular software are.
Figure 1: Space technology (Source: book-last-preproof.pdf)
The relation of solar-terrestrial which can be launched in 2006, that is the study of mass ejection. The mass ejection is the eruption with power which is ten billion auto spheres.
Result of ATC system
The automatic intelligent system also has some challenges and those challenges are like the implementation costs is high, then the architecture is open-source and the migration is away from the source, then the fragmentation for the ecosystem testing, next one is the collaboration in the team, the last one is the automation on the focusing over the result. The scenario of operation which has been developed estimates the ACT .ACT should be based on certain ideas which are under nana satellite. (Hong et al.2019)The pictorial illustrates the scenario which has been based on ideas that are under the community of agent which is proxy. The autonomous constellation has to be operated. The other scenario should correspond to the community of agents. The spacecraft supports evaluating the autonomy concept.
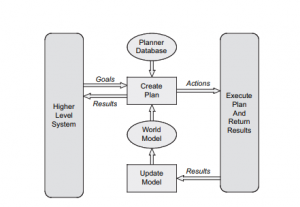
Figure 2: The community of agentm(Source: file:///C:/Users/User/Desktop)
In the above scenario the nana satellites have to be a collection of orbits which are under the magnetosphere. The mission of the operation builds the contact which can select the spacecraft. The plan of the spacecraft comes to a few points – The coordinates of the community agent which can be coordinated with the mission of the goal. The coordination of ground activity which should be communicated with the spacecraft. (Armani, et al. 2021). The plans of schedule contracts which have been external planner with external outsource. The commands are used to accept the interfaces with spacecraft. The agent of the spacecraft is the proxy agent. The agent can be notified. The agent of the mission manager should have occurred. The GCC of the agent should be notified to impend the contact. The spacecraft should be added to the community which has to provide the address of the agent. The spacecraft should be in contact with the scenario of the illustrated matter. The registry of agents as a GCC manager that can start the system. (R. ET al.2021) the agent of the system tries to communicate. The spacecraft obtained the new communication data. The agent should receive the schedule as a GCC planner. The contract manager of the agent can receive the notification that is the signal which is under the spacecraft. The agent can execute the schedule of the contract. (Fibrous, et al. 20210 which are download, delete, save and future pass. These are all under the data category. The agent of the manager can analyze the data which is already downloaded. The telemetry points out the problem. The contact agent can deal with the current agent. The spacecraft processes the proxy agent.
Maintenance strategy
In this part the communication should be l.nominal in a sophisticated autonomous system which has to support the massive amount of data which are generated by the modern ideas. The spacecraft events in an emergency which can control ground that must be generated the access to an information which can be stored then understand the correction of some problem. It must be capable to send the commands which are under the element of hardware in the time of the crisis. The support of the fundamentals requires a mission. (Aggarwal, et al.2018)That is possible during the advance of the post-lunch phase. The capability of uplink of ground should provide the backbone of the FSW. The processor of the uplink should be down. The rate of the downlink which can guarantee the key status of the reception. The details of engineering data should be stored in the set of the problem. The concept of the FSW is non-agent, conventional, and software which can encompass the function. The segment which can refer to the contain of the function is also called the backbone of the function. The agent of software should be on a mission to support the function. The data process of science should manage the volume of data. This should restrict the potential interfere with the crucial process of backbone. (P.K., et al. 2018)The remote agent should control the agent. The impacted backbone of science should be observed. The temporary science observation should be terminated. The backbone of FSW should be time-drive. Every function of the backbone should receive the well contained staff. The process time functioned the particular fixed time which can be related with the processing cycle. The cycle of the process should be completed more cycles within time. The backbone list should be provided – 1.Safemode 2.Thruster firing 3. Thermal management 4. Electrical power of management 5. Data storage. The high level of safe mode is the clue of the function. The safe mode can guarantee that the mission will happen with conduct. (Grover, et al.2018)The pointing of the fixed interval can be discussed to maintain the strategy. The recovery of the spacecraft can be intercepted by science which can schedule the process in lengthy. The controllers of the ground access the internal point mode. The basic point needs to arise from the slew attitude of the vehicle with a different orient.The nominal should be controlled with spacecraft. The activity of the support which is under science execution. The calibration of the instrument should be allocated in the proper agent of the remote. Some of the basic capability must reside at the backbone of the FSW. The event can ensure the onset event.
Autonomous tools
Autonomous systems have many advantages like they have the ability to reach very sensitive places where humans cannot reach. The places are very dangerous like nuclear reactors, then inaccessible places and also inside aero-engines. Everything has two parts, one part is positive and the other part is negative. The autonomous system also faces some major issues. This system also has some challenges, one is they have an ability to make decisions faster for any diverse conditions and in this system includes many dilemmas. The next one is they have very important potential which helps to reduce the environmental-pollution by many optimizations and by diverging the routes and also the driving styles.
In this section the artificial intelligence of the core technology which will build autonomous spacecraft that has to be impossible for the mission. The overview technology that should be discussed. The plan of the technology can be followed according to the act and recognize the technology. After that the technology should try to correct for the testing. It can be difficult to build a statement in the process. The Statement contains strength, software weakness. The latitude of the tremendous can be explain that the majority of information about system. It may be understand the expectations which can be exist.
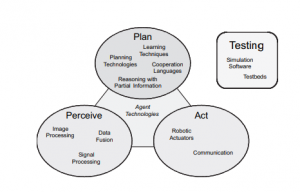
Figure 3: the combination of Autonomy Technology (Source: book-last-preproof.pdf)
The technology of the planning in the cycle of autonomy should be responsible due to examining the environment and also choosing the correct interaction to another system. The central technology of the planner is the planning which is under computerized. The different types of technology can develop the support system of planning. The general combination is evidence of reasoning, study technique and languages. The remaining part of the section, the plan and technique of technology, is normal. The different characteristic of the system of autonomy is being able to select the correct action which can achieve required goals. (P.S. et al. 2018)The system of planner is the software component that commonly uses the capability which can be achieved. The planner should be developed from last year. The following figure can be drawn below:
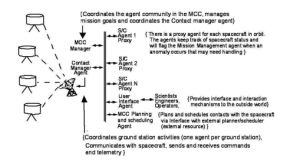
Figure 4: architecture plan (Source: book-last-preproof.pdf)
This above figure shows that sophisticated level of the planner. It is a context of the architecture of a system. Some planners try to introduce the set of primary missions which specify the target of a planner. The target of the planner can be to analyze the view which can be related with the environment. The description of data which can be capable of doing it. After that the planner should choose to perform an action and this action has to be sent affecting the execution. The success can be reported to the high level. Some difficulties happened at the time of execution. The new plan should be created. Whenever no plan should be created then the failure can be reported.
Recommendation
To attain distinct functions, the unknown concerns of the real world should be overcome first as the amount of autonomy rises. However, whenever the hardware as well as software components throughout the system get more difficult, or perhaps the network encounters a demanding circumstance that was not expected in before, technical fault and even dismal tendency would grow. As a consequence, the autonomous program’s performance always need engagement in high-level behavioral decision-making, as well as the autonomous technology could be achieved through prosthetic rehabilitation.
Conclusion
In this part to conclude that learn about autonomic computing which technique is used at the time of writing. The design should implement the software system which is managed by self. The process should help the reader to understand and develop to maintain the system. NASA can explore the goal which can be enabled. The strategy of spacecraft is important to each purpose. That is the most significant address to challenge the vision of being fully autonomic. After that achieves the goal the view of the topic can be engineered and assured regarding works. The perspective of the system should be system level of autonomy. The multiple elements of the autonomic system which can deal with various management and operate the level. The technique of the software which should approach the tools that can be required in the future meet requirements.
Reference list
Journal
Zhu, Y., Lam, H.K., Yang, T., Hong, Z. and Ark, S., 2019. Hybrid Intelligent Algorithms Based Learning, Optimization, and Application to Autonomic Control Systems. Frontiers in neuroscience, 13, p.1090.
Rahmani, R. and Firouzi, R., 2021. Gateway controller with deep sensing: learning to be autonomic in intelligent internet of things. International Journal of Communication Networks and Distributed Systems, 26(1), pp.1-29.
Aggarwal, P.K., Grover, P.S. and Ahuja, L., 2018, August. Incorporating Autonomic Capability as Quality Attribute for a Software System. In 2018 7th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions)(ICRITO) (pp. 829-833). IEEE.
Sanchez, M., Exposito, E. and Aguilar, J., 2020. Autonomic computing in manufacturing process coordination in industry 4.0 context. Journal of industrial information integration, 19, p.100159.
Stefanuk, V.L., Zhozhikashvily, A.V. and Savinitch, L.V., 2020, October. Intelligent systems with restricted autonomy. In Russian Conference on Artificial Intelligence (pp. 460- 471). Springer, Cham.
Boubin, J., Chumley, J., Stewart, C. and Khanal, S., 2019, June. Autonomic computing challenges in fully autonomous precision agriculture. In 2019 IEEE International Conference on Autonomic Computing (ICAC) (pp. 11-17). IEEE.
Tahir, M., Ashraf, Q.M. and Dabbagh, M., 2019, August. Towards enabling autonomic computing in IoT ecosystem. In 2019 IEEE Intl Conf on Dependable, Autonomic and Secure Computing, Intl Conf on Pervasive Intelligence and Computing, Intl Conf on Cloud and Big Data Computing, Intl Conf on Cyber Science and Technology Congress (DASC/PiCom/CBDCom/CyberSciTech) (pp. 646-651). IEEE.
Sterritt, R., Wilkie, G., Saunders, C., Doran, M., Gama, C., Hawe, G. and McGuigan, L., 2020. Inspiration for Space 2.0 from Autonomous NanoTechnology Swarms Concept missions towards Autonomic Robotic Craft. Journal of the British Interplanetary Society, 73(11), pp.397-408.
Müller, M., Müller, T., Talkhestani, B.A., Marks, P., Jazdi, N. and Weyrich, M., 2021. Industrial autonomous systems: a survey on definitions, characteristics and abilities. at-Automatisierungstechnik, 69(1), pp.3-13.
Sánchez, M., Exposito, E. and Aguilar, J., 2020. Implementing self-* autonomic properties in self-coordinated manufacturing processes for the Industry 4.0 context. Computers in industry, 121, p.103247.
Know more about Unique Submission’s other writing services:
